스튜어트 플랫폼
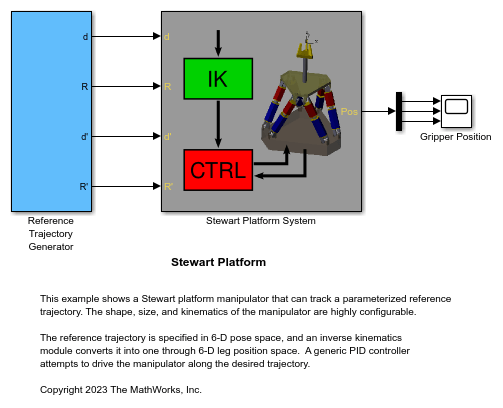
이 모델은 파라미터화된 기준 궤적을 추종할 수 있는 스튜어트 플랫폼 매니퓰레이터를 보여줍니다. 매니퓰레이터의 형태, 크기, 기구학을 자세히 구성할 수 있습니다.
기준 궤적은 6차원 자세 공간에 지정되고, 역기구학 모듈이 이 기준 궤적을 6차원 레그 위치 공간을 통해 하나로 변환합니다. 일반 PID 제어기는 원하는 궤적을 따라 매니퓰레이터를 구동하려고 시도합니다.
참고 항목
Cylindrical Joint | Transform Sensor