시뮬레이션 및 분석
블록 다이어그램을 업데이트하여 멀티바디 모델을 조립하고 초기 구성을 시각화합니다. 시각화 결과는 멀티바디 탐색기(Multibody Explorer)에서 열립니다. 모델을 시뮬레이션하면 대화형 애니메이션이 재생됩니다. 물리 모델에 적합한 솔버(예: daessc)를 선택하고, 시뮬레이션 중 예상되는 가장 빠르고 의미 있는 변화를 캡처할 수 있도록 최대 시간 스텝을 충분히 작게 지정해야 합니다.
애니메이션을 캡처하려면 카메라 관리자(Camera Manager)를 열어 동적으로 움직이는 카메라를 추가합니다. 동적 카메라는 키프레임 카메라 또는 추적 카메라의 두 가지 유형이 있습니다. 키프레임 카메라는 멀티바디 탐색기(Multibody Explorer)에서 대화형 방식으로 생성된 시점 사이를 이동합니다. 추적 카메라는 모델 내 프레임에 연결되어 해당 프레임을 조준합니다. 애니메이션을 비디오 형식으로 녹화하려면 비디오 생성기(Video Creator) 또는 smwritevideo 함수를 사용하십시오.
KinematicsSolver 클래스를 사용하여 모델의 기구학 표현을 만들고, 기구학 문제를 정식화하여 해를 구할 수 있습니다. KinematicsSolver 객체에는 모델에서 사용 가능한 모든 조인트 변수가 포함되어 있습니다. 프레임 변수로 이를 보완하고, 조인트 변수와 프레임 변수를 모두 분석을 위해 목표값, 추정값, 출력값으로 할당합니다.
툴
| 멀티바디 탐색기(Multibody Explorer) | Visualize and explore multibody models |
| 카메라 관리자(Camera Manager) | Create, edit, and delete dynamic cameras |
| 비디오 생성기(Video Creator) | Create and configure videos of multibody animations |
모델 설정
함수
도움말 항목
기본 시각화
- Enable Multibody Explorer
Set the model configuration parameters to ensure that Multibody Explorer opens automatically on model update or simulation. - Manipulate the Visualization Viewpoint
Select a standard view, set the up-axis convention, and use mouse shortcuts to rotate, roll, pan, or zoom a model. - Using Operating Points to Initialize Multibody Models
This example shows how to use operating points to initialize multibody models, specify the initial positions and velocities of the joints in a model, and start simulations of flexible bodies from their deformed states. - Update and Simulate a Model
Workflow steps for updating and simulating a Simscape™ Multibody™ model. - Visualize a Model and Its Components
Visualization is not only a central part of a multibody simulation, but also an essential tool in modeling bodies and verifying their shapes, sizes, frame placements, and colors. Here is an overview of the visualization utilities available in the Simscape Multibody environment and the roles they play in your modeling workflow. - Visualize Simscape Multibody Frames
Use Multibody Explorer frame highlights and Graphic blocks to visualize frames.
고급 시각화
- Go to a Block from Multibody Explorer
Use Multibody Explorer to go to the block corresponding to a tree view pane node. - Selective Model Visualization
Visualization filtering as a means to selectively show and hide solids, bodies, and multibody subsystems in Multibody Explorer. - Selectively Show and Hide Model Components
Use selective model visualization to show only those model components that are relevant to you.
카메라 및 비디오 생성
- Create a Dynamic Camera
Use Camera Manager to create or edit a model visualization camera with a moving viewpoint. - Create a Model Animation Video
Save an animation in video format using Video Creator or thesmwritevideofunction. - Visualization Cameras
Distinction between dynamic cameras and the global camera. Camera Manager as a tool for creating dynamic cameras. Dynamic camera keyframe and tracking modes. - Working with Animation
Review how model animations work and explore the basic controls available for animations.
결함 모델링
- Blocks that Support Fault Modeling
Information on blocks that support faults.
문제 해결
- Multibody Simulation Issues
Learn about Simscape Multibody simulation issues.
추천 예제

Configuring Dynamic Cameras - Vehicle Slalom
Illustrates the use of dynamic cameras to view a vehicle traversing a slalom course. The vehicle accelerates from stationary to a fixed speed and then enters the slalom course. Upon exiting, the vehicle decelerates back to stationary before the end of the road. The model has four dynamic cameras: three with tracking parameterization and one with keyframes. The tracking cameras show the front and side views of the vehicle from a fixed offset relative to the vehicle, along with the view from the driver's perspective. The keyframed camera shows a sweeping view of the vehicle maneuver.

Simulink 및 Simscape Multibody의 이중 진자
이 예제는 이중 진자의 두 가지 모델(Simulink® Input/Output 블록을 사용하는 모델과 Simscape™ Multibody™를 사용하는 모델)을 보여줍니다.
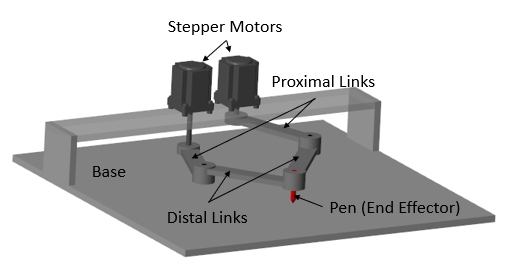
Perform Forward and Inverse Kinematics on a Five-Bar Robot
Use the KinematicsSolver object to perform forward kinematics (FK) and inverse kinematics (IK) on a five-bar robotic mechanism. First, the example demonstrates how to perform FK analyses to calculate a singularity-free workspace for a five-bar robot. Then the example shows how to perform IK analyses to compute the motor angles that correspond to an end-effector trajectory within that workspace.

Pick and Place Robot Using Forward and Inverse Kinematics
Model a delta robot performing a pick and place task.

Simulink 및 Simscape Multibody의 단진자
이 예제는 Simulink® Input/Output 블록과 Simscape™ Multibody™를 사용하여 모델링된 단진자를 보여줍니다. 조인트의 초기 각도는 MATLAB® 변수로 정의됩니다. Integrator 블록의 주석은 월드 프레임을 기준으로 조인트의 초기 각도를 보여줍니다.