보증 메커니즘
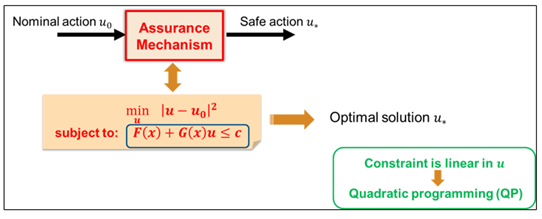
일부 제어 응용 분야에서는 플랜트 상태가 중요한 특정 제약 조건을 위반하지 않도록 제어기에서 제어 동작을 선택해야 합니다. 대부분의 경우 제약 조건은 제어기가 직접 제어하지 않는 플랜트 상태에 적용됩니다. 대신 제어 동작 신호 측면에서 제약 조건을 정의하는 제약 조건 함수를 정의하십시오. 이러한 제약 조건 적용 기법은 보증 메커니즘(assurance mechanism)으로 널리 알려져 있으며, 예기치 못한 상황이 발생하더라도 시스템이 정의된 경계 내에서 안전하게 작동하도록 보장합니다. 이러한 사전 예방적 접근 방식은 고장 예방과 제어 무결성 유지에 도움이 됩니다.
Simulink® Control Design™ 소프트웨어는 명목 제어 동작에 대한 일반 목적 또는 특수 목적 제약 조건을 구현할 수 있게 합니다. 사용 가능한 기법들은 아래 표에 요약되어 있습니다.
| 제약 조건 유형 | 애플리케이션 |
|---|---|
| 범용 목적 — 이 범용 블록을 사용하여 시스템 상태 및 동작 범위의 함수로 제약 조건을 지정하십시오. |
|
| 장벽 인증 함수(barrier certificate) — 제어 장벽 함수를 사용하여 시스템의 원하는 상태 집합을 안전 집합으로 정의함으로써 해당 상태들이 안전 집합 내에 유지되도록 합니다 |
|
| 수동성 — 폐쇄 루프 시스템에 수동성을 강제하기 위해 제어 동작을 수정하여 시스템이 시간이 지남에 따라 에너지를 소모하도록 합니다 |
|
이 기능을 사용하려면 Optimization Toolbox™가 제약 조건과 동작 범위가 적용되면서도 지정된 제어 동작에 가장 가까운, 수정된 제어 동작을 계산해야 합니다.
블록
| Constraint Enforcement | Modify control actions to satisfy constraints and action bounds |
| Barrier Certificate Enforcement | Modify control actions to satisfy barrier certificate constraints and action bounds (R2022a 이후) |
| Passivity Enforcement | Modify control actions to satisfy passivity constraints and action bounds (R2023a 이후) |
| High-Order Control Barrier Function | Modify control actions to satisfy high-order control barrier function (CBF) constraints and action bounds (R2026a 이후) |
도움말 항목
범용 제약 조건 적용
- Constraint Enforcement for Control Design
You can modify control actions in real-time to satisfy constraints and action bounds. - Enforce Constraints for PID Controllers
Apply a known constraint function to a PID control application using the Constraint Enforcement block. - Learn and Apply Constraints for PID Controllers
Learn and apply an unknown constraint function for a PID control application using the Constraint Enforcement block.
제어 장벽 함수 적용
- Enforce Safety Constraints with Control Barrier Functions
Modify control actions to satisfy barrier certificate constraints and action bounds. - Enforce Barrier Certificate Constraints for PID Controllers
Apply barrier certificate constraints to a PID control application using the Control Barrier Function block. - Enforce Barrier Certificate Constraints for Adaptive Cruise Control
Enforce barrier certificate constraints for adaptive cruise control to maintain velocity and following distance. - Enforce Barrier Certificate Constraints for Collision-Free Robots
Enforce barrier certificate constraints for two robots to reach their target positions in collision-free manner. - Enforce Barrier Certificate Constraints for Collision-Free Multi-Robot System
Enforce barrier certificate constraints for three robots to reach their target positions in collision-free manner. - Safe PID Controller for Two Link Robot using High-Order Control Barrier Function
Apply high-order CBF constraints to ensure safety for a two-link robot. (R2026a 이후)
수동성 적용
- Passivity Enforcement for Control Design
Modify control actions to satisfy passivity constraints and action bounds. - Enforce Passivity Constraints for Quadruple-Tank System
Enforce passivity constraints for water height control in a quadruple tank system. - Enforce Passivity Constraint for Flexible Beam
Enforce passivity constraints for vibration control in a flexible beam.
강화 학습 응용 분야
- Train Reinforcement Learning Agent with Constraint Enforcement
Train a reinforcement learning agent with actions constrained using the Constraint Enforcement block. - Train RL Agent for Adaptive Cruise Control with Constraint Enforcement
Train a reinforcement learning agent for adaptive cruise control with enforced constraints on velocity and following distance. - Train RL Agent for Lane Keeping Assist with Constraint Enforcement
Train a reinforcement agent for lane keep assist with enforced constraints on lateral deviation. - Add Safety Constraint to Simulate Two-Link Robot with SAC Agent (Reinforcement Learning Toolbox)
Add high-order barrier function to safely simulate a two-link robot model with a SAC agent.