zp2sos
영점-극점-이득 필터 파라미터를 2차섹션형(SOS) 형식으로 변환
구문
설명
예제
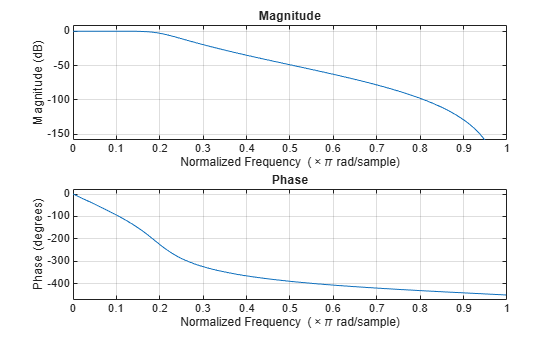
함수 butter를 사용하여 5차 버터워스 저역통과 필터를 설계하고 출력을 영점-극점-이득 형식으로 표현합니다. 차단 주파수를 나이퀴스트 주파수의 1/5로 지정합니다. 결과를 2차섹션형(SOS)으로 변환합니다. 주파수 응답을 시각화합니다.
[z,p,k] = butter(5,0.2); sos = zp2sos(z,p,k)
sos = 3×6
0.0013 0.0013 0 1.0000 -0.5095 0
1.0000 2.0000 1.0000 1.0000 -1.0966 0.3554
1.0000 2.0000 1.0000 1.0000 -1.3693 0.6926
freqz(sos)
입력 인수
출력 인수
알고리즘
zp2sos는 입력된 영점-극점-이득 시스템을 2차섹션형(SOS)으로 표현하기 위해 다음과 같은 4단계 알고리즘을 사용합니다.
cplxpair함수를 사용하여 영점과 극점을 켤레 복소수 쌍으로 그룹화합니다.다음 규칙에 따라 극점과 영점 쌍을 매칭하여 2차섹션형(SOS)을 형성합니다.
단위원에 가장 가까이에 있는 극점과 그러한 극점에 가장 가까이에 있는 영점을 매칭합니다.
단위원에 그 다음으로 가장 가까이에 있는 극점과 그러한 극점에 가장 가까이에 있는 영점을 매칭합니다.
모든 극점과 영점이 매칭될 때까지 계속합니다.
zp2sos는 절댓값이 서로 가장 근접한 실수 극점을 섹션으로 그룹화합니다. 이 규칙은 실수 영점에도 그대로 적용됩니다.극점 쌍과 단위원의 근접도에 따라 섹션을 정렬합니다. 일반적으로
zp2sos는 단위원에 가장 가까이에 있는 극점을 종속 연결에서 마지막에 오도록 섹션을 정렬합니다.zp2sos가 그 반대의 순서로 섹션을 정렬하도록 하려면order인수를 사용합니다.zp2sos는scale에 지정된 노름으로 섹션을 스케일링합니다. 임의의 H(ω)에 대해 스케일링은 다음과 같이 정의됩니다.여기서 p는 무한대 또는 2일 수 있습니다. 이 스케일링은 고정소수점 필터 구현에서 오버플로 또는 피크 반올림 잡음을 최소화하기 위한 시도입니다.
참고 문헌
[1] Jackson, L. B. Digital Filters and Signal Processing. 3rd ed. Boston: Kluwer Academic Publishers, 1996.
[2] Mitra, Sanjit Kumar. Digital Signal Processing: A Computer-Based Approach. 3rd ed. New York: McGraw-Hill Higher Education, 2006.
[3] Vaidyanathan, P. P. "Robust Digital Filter Structures." Handbook for Digital Signal Processing (S. K. Mitra and J. F. Kaiser, eds.). New York: John Wiley & Sons, 1993.
확장 기능
버전 내역
R2006a 이전에 개발됨