upfirdn
업샘플링, FIR 필터 적용 및 다운샘플링
설명
예제
R2026a 이후
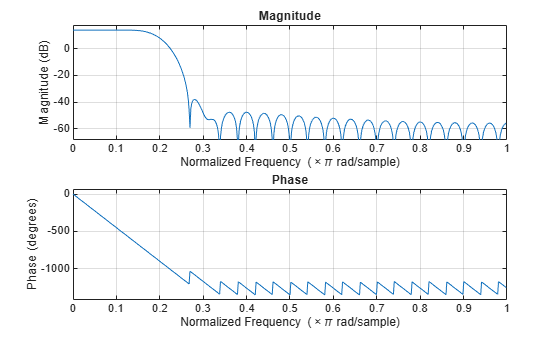
50차 FIR 저역통과 필터를 설계하여 업샘플링에서 영상 아티팩트를 억제합니다. 업샘플링 인자는 5입니다. 필터의 군지연 및 임펄스 응답을 계산합니다.
p = 5; n = 50; h = p*fir1(n,1/p); dl = grpdelay(h,1,1); freqz(h)
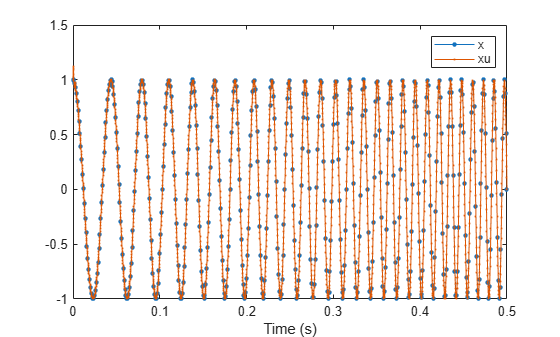
30Hz의 샘플 레이트에서 1초 동안 선형 스윕 코사인(처프) 신호를 정의합니다.
Fs = 1e3; t = single(0:1/Fs:1)'; x = chirp(t,20,t(end),150);
처프 신호를 필터를 적용하고 업샘플링합니다. 입력 신호가 단정밀도를 가지므로 출력도 단정밀도를 갖습니다.
xu = upfirdn(x,h,p);
입력 신호와 출력 신호를 비교합니다. 필터로 인해 발생하는 지연을 보정합니다. 이에 대응하는 리샘플링된 시간 벡터를 생성합니다.
xu = xu(dl+1:end); tu = single(0:(length(xu)-1))/(Fs*p); plot(t,x,".-",MarkerSize=10) hold on plot(tu,xu,".-",MarkerSize=4) hold off xlim([0 0.5]) xlabel("Time (s)") legend(["x" "xu"])
유리수 변환 인자를 사용하여 신호의 샘플 레이트를 DAT 레이트 48kHz에서 CD 샘플 레이트 44.1kHz로 변환합니다. rat 함수를 사용하여 유리수 인자의 분자 L과 분모 M을 구합니다.
Fdat = 48e3; Fcd = 44.1e3; [p,q] = rat(Fcd/Fdat)
p = 147
q = 160
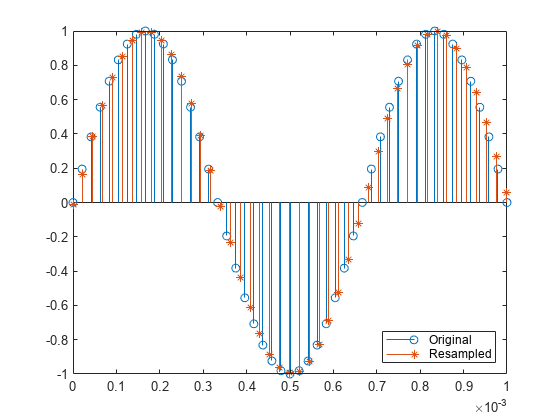
0.25초 동안 로 샘플링된 1.5kHz 정현파 샘플을 생성합니다. 신호를 1밀리초 동안 플로팅합니다.
t = 0:1/Fdat:0.25-1/Fdat; x = sin(2*pi*1.5e3*t); stem(t,x) xlim([0 0.001]) xlabel("Time (s)") hold on

카이저 윈도우를 사용하여 안티에일리어싱 저역통과 필터를 설계합니다. 필터 대역 경계를 차단 주파수 의 90%와 110%로 설정합니다. 통과대역 리플을 5dB로 지정하고 저지대역 감쇠량을 40dB로 지정합니다. 통과대역 이득을 L로 설정합니다.
f = (Fdat/2)*min(1/p,1/q); d = designfilt("lowpassfir", ... PassbandFrequency=0.9*f,StopbandFrequency=1.1*f, ... PassbandRipple=5,StopbandAttenuation=40, ... DesignMethod="kaiserwin",SampleRate=48e3); h = p*tf(d);
upfirdn을 필터 h와 함께 사용하여 정현파를 리샘플링합니다. 필터로 인해 발생하는 지연을 계산하고 보정합니다. 이에 대응하는 리샘플링된 시간 벡터를 생성합니다.
y = upfirdn(x,h,p,q); delay = floor(((filtord(d)-1)/2-(p-1))/p); y = y(delay+1:end); t_res = (0:(length(y)-1))/Fcd;
플롯에 리샘플링된 신호를 겹쳐 놓습니다.
stem(t_res,y,"*") legend("Original","Resampled",Location="southeast") hold off
입력 인수
출력 인수
팁
x이 벡터이고h도 벡터임.입력값이 한 개의 필터와 한 개의 신호이기 때문에, 함수는
x을h와 컨벌루션합니다.y이 행 벡터이면 출력 신호x은 행 벡터입니다. 그렇지 않은 경우y은 열 벡터입니다.x이 행렬이고h가 벡터임.입력값이 한 개의 필터와 여러 개의 신호이기 때문에, 함수는
h를x의 각 열과 컨벌루션합니다. 결과로 생성된y은x과 열 개수가 같은 행렬입니다.x이 벡터이고h가 행렬임.입력값이 여러 개의 필터와 한 개의 신호이기 때문에, 함수는
h의 각 열을x과 컨벌루션합니다. 결과로 생성된y은h과 열 개수가 같은 행렬입니다.x과h가 열 개수가 같은 행렬임.입력값이 여러 개의 필터와 여러 개의 신호이기 때문에, 함수는
x과h의 대응 열을 컨벌루션합니다. 결과로 생성된y은x및h와 열 개수가 같은 행렬입니다.
알고리즘
upfirdn은 다상 보간 구조를 사용합니다. 다상 구조에서 다중 가산 연산의 개수는 (LhLx – pLx)/q이며, 여기서 Lh와 Lx의 길이는 각각 h(n)과 x(n)입니다. 이 공식은 긴 신호에 대해 대체로 정확합니다.
upfirdn은 다음 세 가지 작업을 잇따라 수행합니다.
참고 문헌
[1] Crochiere, R. E. "A General Program to Perform Sampling Rate Conversion of Data by Rational Ratios." Programs for Digital Signal Processing (Digital Signal Processing Committee of the IEEE Acoustics, Speech, and Signal Processing Society, eds.). New York: IEEE Press, 1979, Programs 8.2-1–8.2-7.
[2] Crochiere, R. E., and Lawrence R. Rabiner. Multirate Digital Signal Processing. Englewood Cliffs, NJ: Prentice-Hall, 1983.