idct
이산 코사인 역변환
설명
y = idct(___,Type=dcttype)
예제
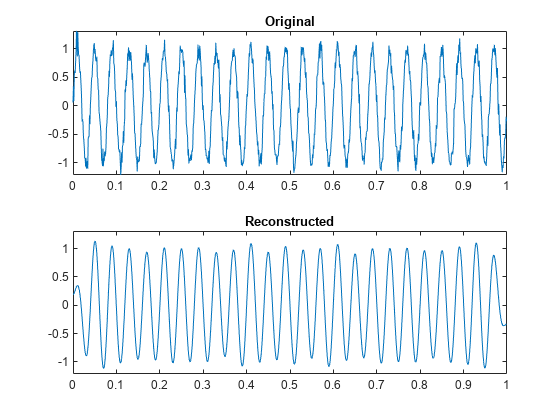
1초 동안 1000Hz로 샘플링된 25Hz 정현파로 구성된 신호를 생성합니다. 정현파는 분산이 0.01인 백색 가우스 잡음에 묻혀 있습니다.
rng('default')
Fs = 1000;
t = 0:1/Fs:1-1/Fs;
x = sin(2*pi*25*t) + randn(size(t))/10;시퀀스의 이산 코사인 변환을 계산합니다. 1000개의 DCT 계수 중에서 유의미한 계수가 몇 개인지 확인합니다. 유의성의 임계값으로 1을 선택합니다.
y = dct(x); sigcoeff = abs(y) >= 1; howmany = sum(sigcoeff)
howmany = 17
유의미한 성분만 사용하여 신호를 복원합니다.
y(~sigcoeff) = 0; z = idct(y);
원래 신호와 복원된 신호를 플로팅합니다.
subplot(2,1,1) plot(t,x) yl = ylim; title('Original') subplot(2,1,2) plot(t,z) ylim(yl) title('Reconstructed')
랜덤 신호를 벤치마크로 사용하여 이산 코사인 변환의 여러 변형이 직교 변환인지 확인합니다.
먼저 신호를 생성합니다.
s = randn(1000,1);
DCT-1과 DCT-4가 서로의 역변환인지 확인합니다.
dct1 = dct(s,'Type',1); idt1 = idct(s,'Type',1); max(abs(dct1-idt1))
ans = 1.3323e-15
dct4 = dct(s,'Type',4); idt4 = idct(s,'Type',4); max(abs(dct4-idt4))
ans = 1.3323e-15
DCT-2와 DCT-3이 서로의 역변환인지 확인합니다.
dct2 = dct(s,'Type',2); idt2 = idct(s,'Type',3); max(abs(dct2-idt2))
ans = 4.4409e-16
dct3 = dct(s,'Type',3); idt3 = idct(s,'Type',2); max(abs(dct3-idt3))
ans = 1.1102e-15
입력 인수
출력 인수
세부 정보
참고 문헌
[1] Jain, A. K. Fundamentals of Digital Image Processing. Englewood Cliffs, NJ: Prentice-Hall, 1989.
[2] Oppenheim, Alan V., Ronald W. Schafer, and John R. Buck. Discrete-Time Signal Processing. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 1999.
[3] Pennebaker, W. B., and J. L. Mitchell. JPEG Still Image Data Compression Standard. New York: Van Nostrand Reinhold, 1993.
확장 기능
버전 내역
R2006a 이전에 개발됨