corrmtx
자기상관 행렬 추정을 위한 데이터 행렬
설명
예제
백색 가우스 잡음에 묻혀 있고 3개의 복소수 지수로 구성된 신호를 생성합니다. 'modified' 메서드를 사용하여 데이터와 자기상관 행렬을 계산합니다.
n = 0:99;
s = exp(i*pi/2*n)+2*exp(i*pi/4*n)+exp(i*pi/3*n)+randn(1,100);
m = 12;
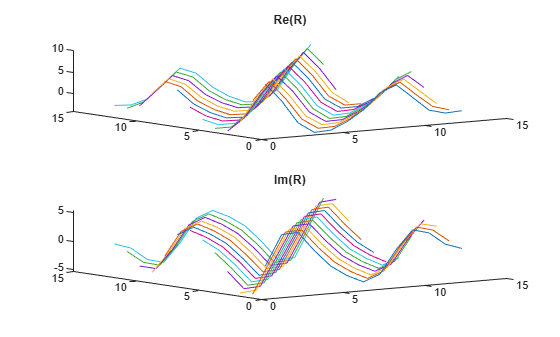
[X,R] = corrmtx(s,m,'modified');자기상관 행렬의 실수부와 허수부를 플로팅합니다.
[A,B] = ndgrid(1:m+1); subplot(2,1,1) plot3(A,B,real(R)) title('Re(R)') subplot(2,1,2) plot3(A,B,imag(R)) title('Im(R)')
입력 인수
출력 인수
알고리즘
corrmtx로 계산되는 테플리츠 데이터 행렬은 사용자가 선택하는 방법에 따라 달라집니다. autocorrelation(디폴트 값) 방법에 의해 결정되는 행렬은 다음과 같습니다.
이 행렬에서 m은 corrmtx에 대한 입력 인수 m과 동일하고, n은 length(x)입니다. 각 방법에 따른 corrmtx의 출력값 H를 반환하기 위해 이 행렬의 변형된 형태가 사용됩니다.
'autocorrelation'— (디폴트 값)H= H.'prewindowed'—H는 H의 n×(m + 1) 부분행렬이며, 첫 번째 행이 [x(1) … 0]이고 마지막 행이 [x(n) … x(n – m)]입니다.'postwindowed'—H는 H의 n×(m + 1) 부분행렬이며, 첫 번째 행이 [x(m + 1) … x(1)]이고 마지막 행이 [0 … x(n)]입니다.'covariance'—H는 H의 (n – m)×(m + 1) 부분행렬이며, 첫 번째 행이 [x(m + 1) … x(1)]이고 마지막 행이 [x(n) … x(n – m)]이며, 을 곱합니다.'modified'—H는 다음으로 정의되는 2(n – m)-by-(m + 1) 행렬 Hmod입니다.
참고 문헌
[1] Marple, S. Lawrence. Digital Spectral Analysis: With Applications. Prentice-Hall Signal Processing Series. Englewood Cliffs, N.J: Prentice-Hall, 1987.
확장 기능
버전 내역
R2006a 이전에 개발됨