aryule
자기회귀 전극점 모델 파라미터 — Yule-Walker 방법
설명
예제
다항식 계수로 구성된 벡터를 사용하여 백색 잡음의 1024개 샘플을 필터링함으로써 AR(4) 과정을 생성합니다. 재현 가능한 결과를 얻기 위해 난수 생성기를 재설정합니다. Yule-Walker 방법을 사용하여 계수를 추정합니다.
rng default
A = [1 -2.7607 3.8106 -2.6535 0.9238];
y = filter(1,A,0.2*randn(1024,1));
arcoeffs = aryule(y,4)arcoeffs = 1×5
1.0000 -2.7262 3.7296 -2.5753 0.8927
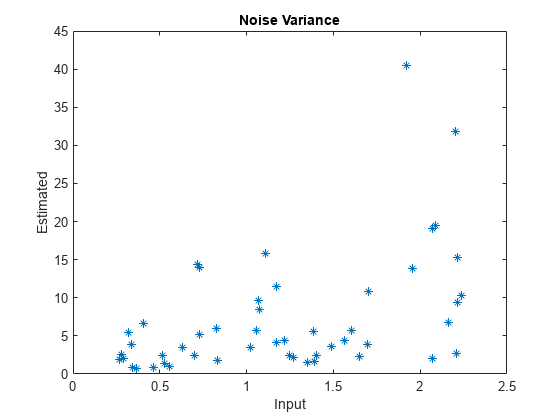
매번 입력 잡음의 분산을 변경하여 해당 과정에 대해 50개의 구현을 생성합니다. Yule-Walker 방법으로 추정한 분산과 실제 값을 비교합니다.
nrealiz = 50; noisestdz = rand(1,nrealiz)+0.5; randnoise = randn(1024,nrealiz); noisevar = zeros(1,nrealiz); for k = 1:nrealiz y = filter(1,A,noisestdz(k) * randnoise(:,k)); [arcoeffs,noisevar(k)] = aryule(y,4); end plot(noisestdz.^2,noisevar,'*') title('Noise Variance') xlabel('Input') ylabel('Estimated')
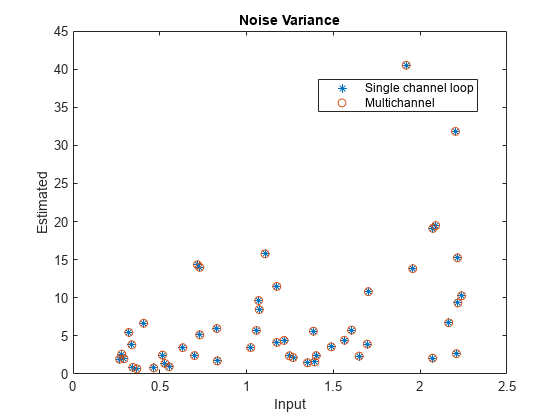
함수의 다중채널 구문을 사용하여 이 절차를 반복합니다.
Y = filter(1,A,noisestdz.*randnoise); [coeffs,variances] = aryule(Y,4); hold on plot(noisestdz.^2,variances,'o') hold off legend('Single channel loop','Multichannel','Location','best')
다항식 계수로 구성된 벡터를 사용하여 백색 잡음의 1024개 샘플을 필터링함으로써 AR(2) 과정을 생성합니다. 재현 가능한 결과를 얻기 위해 난수 생성기를 재설정합니다.
rng default
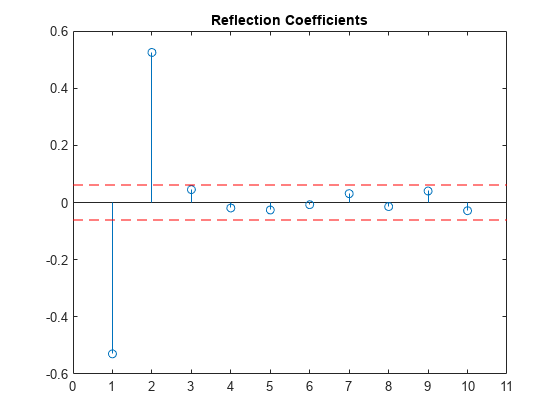
y = filter(1,[1 -0.75 0.5],0.2*randn(1024,1));Yule-Walker 방법을 사용하여 AR(10) 모델을 과정에 피팅합니다. 반사 계수를 출력하고 플로팅합니다. 처음 두 개의 계수만 95% 신뢰한계 밖에 존재합니다. 이는 AR(10) 모델이 데이터의 시간 의존성을 상당히 과대 추정했음을 나타냅니다. 자세한 내용은 AR Order Selection with Partial Autocorrelation Sequence 항목을 참조하십시오.
[ar,nvar,rc] = aryule(y,10); stem(rc) xlim([0 11]) conf95 = sqrt(2)*erfinv(0.95)/sqrt(1024); [X,Y] = ndgrid(xlim,conf95*[-1 1]); hold on plot(X,Y,'--r') hold off title('Reflection Coefficients')
입력 인수
출력 인수
세부 정보
알고리즘
aryule은 표본 자기상관 시퀀스에 대한 편향 추정값에 Levinson-Durbin 재귀를 사용하여 파라미터를 계산합니다.
참고 문헌
[1] Hayes, Monson H. Statistical Digital Signal Processing and Modeling. New York: John Wiley & Sons, 1996.
확장 기능
버전 내역
R2006a 이전에 개발됨