levinson
Levinson-Durbin 재귀
설명
예제
다음으로 지정되는 자기회귀 과정의 계수를 추정합니다.
a = [1 0.1 -0.8 -0.27];
분산이 0.4인 백색 잡음을 필터링하여 과정의 한 구현을 생성합니다.
v = 0.4; w = sqrt(v)*randn(15000,1); x = filter(1,a,w);
상관관계 함수를 추정합니다. 음수 지연값의 상관관계 값을 삭제합니다. Levinson-Durbin 재귀를 사용하여 모델 계수를 추정합니다. 예측 오차가 입력값의 분산에 대응됨을 확인합니다.
[r,lg] = xcorr(x,'biased');
r(lg<0) = [];
[ar,e] = levinson(r,numel(a)-1)ar = 1×4
1.0000 0.0772 -0.7954 -0.2493
e = 0.3909
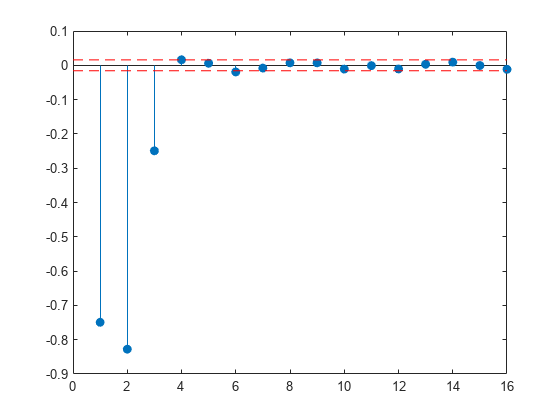
16차 모델의 반사 계수를 추정합니다. 95% 신뢰한계 밖에 존재하는 반사 계수들만 올바른 모델 차수에 대응되는 반사 계수임을 확인합니다. 자세한 내용은 AR Order Selection with Partial Autocorrelation Sequence 항목을 참조하십시오.
[~,~,k] = levinson(r,16); stem(k,'filled') conf = sqrt(2)*erfinv(0.95)/sqrt(15000); hold on [X,Y] = ndgrid(xlim,conf*[-1 1]); plot(X,Y,'--r') hold off
다음으로 지정되는 자기회귀 과정의 계수를 생성합니다.
a = [1 0.1 -0.8 -0.27];
서로 다른 분산을 갖는 백색 잡음을 필터링함으로써 자기회귀 과정의 구현 5개를 생성합니다.
nr = 5; v = rand(1,nr)
v = 1×5
0.8147 0.9058 0.1270 0.9134 0.6324
w = sqrt(v).*randn(15000,nr); x = filter(1,a,w);
상관관계 함수를 추정합니다. 음수 지연값의 상관관계 값과 상호상관 항을 삭제합니다. Levinson-Durbin 재귀를 사용하여 올바른 모델 차수에 대해 예측 오차를 추정하고, 예측 오차가 입력 잡음 신호의 분산에 대응됨을 확인합니다.
[r,lg] = xcorr(x,'biased');
[~,e] = levinson(r(lg>=0,1:nr+1:end),numel(a)-1)e = 5×1
0.7957
0.9045
0.1255
0.9290
0.6291
입력 인수
출력 인수
알고리즘
Levinson-Durbin 재귀는 미리 정해진 결정적 자기상관 시퀀스로 전극점 IIR 필터를 구하는 알고리즘입니다. 이 알고리즘은 필터 설계, 코딩, 스펙트럼 추정 분야에 응용됩니다. levinson에서 생성하는 필터는 최소 위상입니다.
levinson은 대칭 테플리츠 선형 연립방정식을 풉니다.
여기서 r = [r(1) ... r(n + 1)]은 입력 자기상관 벡터이고, r(i)*는 r(i)의 켤레 복소수입니다. 입력값 r은 일반적으로 지연값 0이 첫 번째 요소 r(1)인 자기상관 계수로 구성된 벡터입니다.
참고
r이 유효한 자기상관 시퀀스가 아니면, levinson 함수는 해가 있더라도 NaN을 반환할 수 있습니다.
이 알고리즘에는 O(n2) 플롭스가 필요하므로, n 값이 클 경우 MATLAB® 백슬래시 명령보다 훨씬 더 효율적입니다. 그러나 levinson 함수는 낮은 차수의 경우 가능한 가장 빠른 실행 속도를 위해 \를 사용합니다.
참고 문헌
[1] Ljung, Lennart. System Identification: Theory for the User. 2nd Ed. Upper Saddle River, NJ: Prentice Hall, 1999.
확장 기능
버전 내역
R2006a 이전에 개발됨