arburg
자기회귀 전극점 모델 파라미터 — Burg 방법
설명
예제
다항식 계수로 구성된 벡터를 사용하여 백색 잡음의 1024개 샘플을 필터링함으로써 AR(4) 과정을 생성합니다. 재현 가능한 결과를 얻기 위해 난수 생성기를 재설정합니다. Burg 방법을 사용하여 계수를 추정합니다.
rng default
A = [1 -2.7607 3.8106 -2.6535 0.9238];
y = filter(1,A,0.2*randn(1024,1));
arcoeffs = arburg(y,4)arcoeffs = 1×5
1.0000 -2.7743 3.8408 -2.6843 0.9360
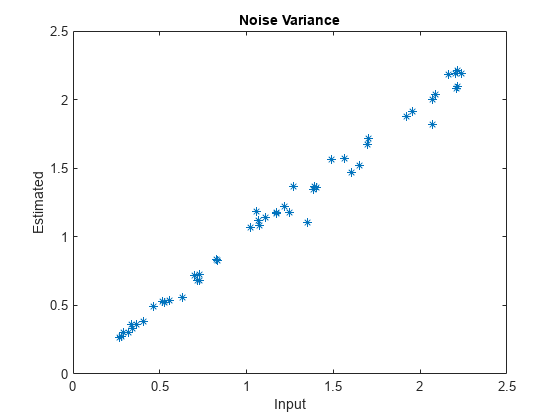
매번 입력 잡음의 분산을 변경하여 해당 과정에 대해 50개의 구현을 생성합니다. Burg 방법으로 추정한 분산과 실제 값을 비교합니다.
nrealiz = 50; noisestdz = rand(1,nrealiz)+0.5; randnoise = randn(1024,nrealiz); noisevar = zeros(1,nrealiz); for k = 1:nrealiz y = filter(1,A,noisestdz(k) * randnoise(:,k)); [arcoeffs,noisevar(k)] = arburg(y,4); end plot(noisestdz.^2,noisevar,'*') title('Noise Variance') xlabel('Input') ylabel('Estimated')
함수의 다중채널 구문을 사용하여 이 절차를 반복합니다.
Y = filter(1,A,noisestdz.*randnoise); [coeffs,variances] = arburg(Y,4); hold on plot(noisestdz.^2,variances,'o') hold off legend('Single channel loop','Multichannel','Location','best')

입력 인수
출력 인수
세부 정보
알고리즘
Burg 방법은 반사 계수를 추정하고 반사 계수를 사용하여 AR 파라미터를 재귀적으로 추정합니다. 순방향과 역방향 예측 오차의 업데이트를 설명하는 재귀와 격자 필터 관계는 [1]에서 확인할 수 있습니다.
참고 문헌
[1] Kay, Steven M. Modern Spectral Estimation: Theory and Application. Englewood Cliffs, NJ: Prentice Hall, 1988.
확장 기능
버전 내역
R2006a 이전에 개발됨