이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
ros2genmsg
ROS 2 정의에서 사용자 지정 메시지 생성
설명
ros2genmsg(는 지정된 폴더 경로에서 ROS 2 사용자 지정 메시지와 서비스 정의를 읽어 ROS 2 사용자 지정 메시지를 생성합니다. 이 함수 폴더에는 하나 이상의 ROS 2 패키지가 포함되어 있어야 합니다. 이러한 패키지는 folderpath).msg 파일의 메시지 정의, .srv 파일의 서비스 정의, .action 파일의 액션 정의를 포함합니다.
사용자 지정 메시지를 생성하고 나면 지원되는 다른 모든 메시지처럼 MATLAB®에서 사용자 지정 메시지를 보내고 받을 수 있습니다. ros2message를 사용하여 이러한 메시지를 생성하거나, MATLAB 명령 창에 ros2 msg list를 입력하여 메시지 목록을 볼 수 있습니다.
참고
ROS 2 사용자 지정 메시지를 생성하려면 ROS 2 패키지를 빌드해야 합니다. 이 과정을 수행하려면 해당 플랫폼용 C++ 컴파일러가 필요합니다. 자세한 내용은 ROS Toolbox 시스템 요구 사항 항목을 참조하십시오.
ROS 2 정의의 사용자 지정 메시지는 MATLAB의 새 릴리스마다 매번 다시 생성해야 합니다.
MATLAB에서 생성하는 사용자 지정 메시지는 이제 eProsima Fast DDS 미들웨어와 Eclipse Cyclone DDS 미들웨어를 지원합니다. ROS 미들웨어 구현에 대한 자세한 내용은 Switching Between ROS Middleware Implementations 항목을 참조하십시오.
ros2genmsg(는 하나 이상의 이름-값 인수를 사용하여 추가 옵션을 지정합니다.folderpath,Name=Value)
예제
사용자 지정 메시지를 사용하여 현재 ROS 2에서 지원되는 메시지 유형 세트를 확장할 수 있습니다. 사용자 지정 메시지는 사용자가 정의하는 메시지입니다. 현재 지원되는 메시지 유형을 보내고 받고 있다면 사용자 지정 메시지를 사용할 필요가 없습니다. 지원되는 메시지 유형의 목록을 보려면 MATLAB® 명령 창에 ros2 msg list를 입력합니다. 지원되는 ROS 2 메시지에 대한 자세한 내용은 Work with Basic ROS 2 Messages 항목을 참조하십시오.
ROS 2 사용자 지정 메시지를 처음 사용한다면 ROS Toolbox 시스템 요구 사항 항목을 참조하십시오.
ROS 2 사용자 지정 메시지는 이름이 msg인 폴더가 포함된 ROS 2 패키지 폴더에 지정됩니다. msg 폴더에는 모든 사용자 지정 메시지 유형 정의가 포함됩니다. 예를 들어 custom 폴더의 example_b_msgs 패키지는 다음과 같은 폴더와 파일 구조를 갖습니다.
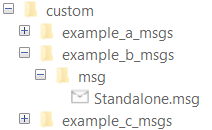
이 패키지는 사용자 지정 메시지 유형 Standalone.msg를 포함합니다. MATLAB은 이러한 파일을 사용하여 패키지에 포함된 사용자 지정 메시지를 사용하기 위해 필요한 파일을 생성합니다.
이 예제에서는 MATLAB에서 ROS 2 사용자 지정 메시지를 만듭니다. 필수적인 msg 파일이 포함되어 있는 ROS 2 패키지가 있어야 합니다.
사용자 지정 메시지 패키지가 올바른지 확인한 다음에는 부모 폴더의 경로를 지정하고 지정된 경로로 ros2genmsg를 호출합니다. 다음 예제에서는 종속성이 있는 세 개의 메시지 example_package_a,, example_package_b, example_package_c를 제공했습니다. 이 예제에서는 여러 메시지가 포함된 폴더를 사용하여 이들을 동시에 생성할 수 있음을 보여줍니다.
새 MATLAB 세션을 열고 로컬 폴더에 사용자 지정 메시지 폴더를 만듭니다.
folderPath = fullfile(pwd,"custom"); copyfile("example_*_msgs",folderPath);
사용자 지정 메시지 파일의 폴더 경로를 지정하고 ros2genmsg를 사용하여 사용자 지정 메시지를 만듭니다.
ros2genmsg(folderPath)
Identifying message files in folder 'C:/Work/custom'.Done. Removing previous version of Python virtual environment.Done. Creating a Python virtual environment.Done. Adding required Python packages to virtual environment.Done. Copying include folders.Done. Copying libraries.Done. Validating message files in folder 'C:/Work/custom'.Done. [3/3] Generating MATLAB interfaces for custom message packages... Done. Running colcon build in folder 'C:/Work/custom/matlab_msg_gen/win64'. Build in progress. This may take several minutes... Build succeeded.build log
ros2 msg list를 호출하여 새 사용자 지정 메시지가 생성되었는지 확인합니다.
ros2 msg list
action_msgs/CancelGoalRequest action_msgs/GoalInfo action_msgs/GoalStatusArray actionlib_msgs/GoalID actionlib_msgs/GoalStatus builtin_interfaces/Duration builtin_interfaces/Time composition_interfaces/ListNodesRequest composition_interfaces/ListNodesResponse diagnostic_msgs/AddDiagnosticsRequest diagnostic_msgs/AddDiagnosticsResponse example_a_msgs/DependsOnB example_b_msgs/Standalone example_interfaces/AddTwoIntsRequest example_interfaces/AddTwoIntsResponse example_interfaces/Bool example_interfaces/Byte...
이제 위에서 만든 사용자 지정 메시지를 표준 메시지로 사용할 수 있습니다. 메시지를 주고받는 것에 대한 자세한 내용은 ROS 2 Publisher 및 ROS 2 Subscriber를 사용해 데이터 교환하기 항목을 참조하십시오.
example_b_msgs/Standalone 메시지를 사용할 publisher를 생성합니다.
node = ros2node("/node_1"); pub = ros2publisher(node,"/example_topic","example_b_msgs/Standalone");
동일한 토픽에 대한 subscriber를 생성합니다.
sub = ros2subscriber(node,"/example_topic");메시지를 만들고 만든 메시지를 보냅니다.
custom_msg = ros2message("example_b_msgs/Standalone"); custom_msg.int_property = uint32(12); custom_msg.string_property='This is ROS 2 custom message example'; send(pub,custom_msg); pause(3) % Allow a few seconds for the message to arrive
LatestMessage 필드를 사용하여 subscriber가 받은 최근 메시지를 확인합니다.
sub.LatestMessage
ans = struct with fields:
MessageType: 'example_b_msgs/Standalone'
int_property: 12
string_property: 'This is ROS 2 custom message example'
생성된 ROS 객체를 제거합니다.
clear node pub sub
내장 메시지의 정의를 사용자 지정 정의로 바꾸기
MATLAB에는 많은 ROS 2 메시지 유형이 내장되어 있습니다. 위에서 자세히 설명한 사용자 지정 메시지 생성 워크플로를 사용하여 이러한 메시지 유형의 정의를 새 정의로 바꿀 수 있습니다. 내장된 메시지 패키지의 정의를 바꿀 때는 해당 내장 메시지 패키지의 모든 메시지 유형에 대한 새 정의(.msg 파일)가 사용자 지정 메시지 패키지 폴더에 포함되어 있는지 확인해야 합니다.
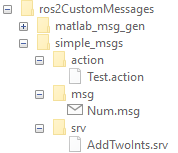
이 예제에서는 MATLAB에서 공유 가능한 ROS 2 사용자 지정 메시지 패키지를 생성합니다. 필수적인 msg 파일이 포함되어 있는 ROS 2 패키지가 있어야 합니다. 다음 그림은 적절한 폴더 구조의 예를 보여줍니다.
사용자 지정 메시지 패키지 폴더를 준비한 다음에는 부모 폴더의 경로를 지정하고 지정된 경로로 ros2genmsg를 호출합니다.
새 MATLAB 세션을 열고 로컬 폴더에 사용자 지정 메시지 패키지 폴더를 만듭니다. Windows 시스템에서 사용자 지정 메시지를 생성하는 경우, 짧은 폴더 경로를 선택하면 폴더 경로의 문자 수 제한을 피할 수 있습니다. 예를 들면 다음과 같습니다.
genDir = fullfile('C:/test/ros2CustomMessages')
genDir = fullfile(pwd,'ros2CustomMessages'); packagePath = fullfile(genDir,'simple_msgs'); mkdir(packagePath)
사용자 지정 메시지 패키지 폴더 안에 이름이 msg인 폴더를 만듭니다.
mkdir(packagePath,'msg')msg 폴더 안에 이름이 .msg인 파일을 만듭니다.
messageDefinition = {'int64 num'};
fileID = fopen(fullfile(packagePath,'msg', ...
'Num.msg'),'w');
fprintf(fileID,'%s\n',messageDefinition{:});
fclose(fileID);사용자 지정 메시지 패키지 폴더 안에 이름이 srv인 폴더를 만듭니다.
mkdir(packagePath,'srv')srv 폴더 안에 이름이 .srv인 파일을 만듭니다.
serviceDefinition = {'int64 a'
'int64 b'
'---'
'int64 sum'};
fileID = fopen(fullfile(packagePath,'srv', ...
'AddTwoInts.srv'),'w');
fprintf(fileID,'%s\n',serviceDefinition{:});
fclose(fileID);사용자 지정 메시지 패키지 폴더 안에 이름이 action인 폴더를 만듭니다.
mkdir(packagePath,'action')action 폴더 안에 이름이 .action인 파일을 만듭니다.
actionDefinition = {'int64 goal'
'---'
'int64 result'
'---'
'int64 feedback'};
fileID = fopen(fullfile(packagePath,'action', ...
'Test.action'),'w');
fprintf(fileID,'%s\n',actionDefinition{:});
fclose(fileID);.msg, .srv 파일과 .action 파일의 ROS 2 정의에서 사용자 지정 메시지를 생성합니다. 생성된 사용자 지정 메시지의 공유 가능한 ZIP 아카이브를 CreateShareableFile 이름-값 인수를 사용하여 만듭니다.
이 ZIP 아카이브를 사용해 다른 시스템에 사용자 지정 메시지를 등록하는 방법에 대한 자세한 내용은 ros2RegisterMessages 항목을 참조하십시오.
ros2genmsg(genDir,CreateShareableFile=true);
Identifying message files in folder 'C:/Users/echakrab/OneDrive - MathWorks/Documents/MATLAB/ExampleManager/echakrab.Bdoc23a.ROS2transform/ros-ex71849911/ros2CustomMessages'.Validating message files in folder 'C:/Users/echakrab/OneDrive - MathWorks/Documents/MATLAB/ExampleManager/echakrab.Bdoc23a.ROS2transform/ros-ex71849911/ros2CustomMessages'.Done. Creating a Python virtual environment.Done. Adding required Python packages to virtual environment.Done. Copying include folders.Done. Copying libraries.Done. Done. [1/1] Generating MATLAB interfaces for custom message packages... Done. Running colcon build in folder 'C:/Users/echakrab/OneDrive - MathWorks/Documents/MATLAB/ExampleManager/echakrab.Bdoc23a.ROS2transform/ros-ex71849911/ros2CustomMessages/matlab_msg_gen/win64'. Build in progress. This may take several minutes...
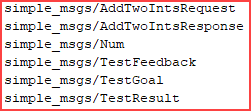
명령 창에서 ros2 msg list를 입력하여 새 사용자 지정 메시지가 생성되었는지 확인합니다.
입력 인수
이름-값 인수
제한 사항
노드 재시작
사용자 지정 메시지를 생성한 다음 기존 ROS 2 노드를 다시 시작합니다.
사용자 지정 메시지를 통한 코드 생성:
사용자 지정 메시지 및 서비스 유형을 ROS 2 기능과 함께 사용하여 독립형 ROS 2 노드에 대한 C++ 코드를 생성할 수 있습니다. 생성된 TGZ 아카이브는 사용자 지정 메시지에 대한 정의를 포함하지만 ROS 2 사용자 지정 메시지 패키지는 포함하지 않습니다. 함수가 대상에서 생성된 코드를 빌드할 때 colcon 작업 공간에서 사용자 지정 메시지 패키지를 사용할 수 있어야 합니다. 이 작업 공간을 현재 작업 디렉터리로 설정하십시오. 생성된 코드를 빌드하기 전에 사용자 지정 메시지 패키지를 시스템에 설치하거나 복사하십시오.
MATLAB Compiler
MATLAB Compiler™는 ROS 사용자 지정 메시지와
ros2genmsg함수를 지원하지 않습니다.
팁
Microsoft® Visual Studio®를 설치할 때 Workload를 Desktop development with C++로 선택해야 합니다. 그러면 MSVC 컴파일러와 사용자 지정 메시지를 생성하는 데 필요한 모든 종속 항목이 설치됩니다.
사용자 지정 메시지 폴더의 경로가 64자를 초과하지 않도록 합니다.
Python 환경 구성이 올바른지 확인하십시오. 자세한 내용은 ROS Toolbox 시스템 요구 사항 항목을 참조하십시오.
ROS 2용으로 생성된 사용자 지정 메시지 라이브러리는 사용자가 만든 파일로, 내부 ROS 워크플로에 통합됩니다. 이러한 파일을 무단 액세스로부터 보호하고 시스템 무결성을 유지하려면 적절한 디렉터리 권한을 설정하여 의도된 사용자 계정만 액세스할 수 있도록 제한하십시오.