ROS 지원 시뮬레이터와의 연결
ROS Toolbox는 MATLAB®과 Simulink®를 사용하여 애플리케이션을 시뮬레이션하고 배포할 수 있도록 ROS 지원 시뮬레이터와의 연결을 지원합니다. 이 페이지에는 ROS Toolbox를 사용하여 ROS 지원 시뮬레이터에 연결하는 것을 보여주는 예제가 나와 있습니다.
Gazebo 시뮬레이터
Unity® 게임 엔진
CARLA 시뮬레이터
NVIDIA® Isaac Sim
MATLAB과 Simulink에서 로봇과 자율 시스템의 인식, 모션 계획, 제어 알고리즘을 설계하고 시뮬레이터에서 시뮬레이션한 후 실제 환경에 알고리즘을 배포할 수 있습니다.
ROS Toolbox는 MATLAB 및 Simulink와 ROS 지원 시뮬레이터 사이에 네트워크를 구축하는 미들웨어 역할을 합니다. 외부 시뮬레이터에서 엔터티를 설정하고 연결할 수 있으며, ROS Toolbox를 사용하여 생성된 통신 채널을 통해 이들을 제어할 수 있습니다.
도움말 항목
- Gazebo 및 시뮬레이션된 TurtleBot 시작하기
Gazebo® 시뮬레이터 엔진을 설정하고 시뮬레이션된 TurtleBot®으로 Gazebo를 자세히 탐색합니다.
- Set Up and Connect to Unity Game Engine
Set up and connect to Unity Game Engine using ROS Toolbox to simulate various robotic manipulator applications.
- Set Up and Connect to CARLA Simulator
Set up and connect to the CARLA simulator using ROS Toolbox to simulate autonomous driving applications.
- Set Up and Connect to NVIDIA Isaac Sim
Set Up and connect to NVIDIA Isaac Sim® application to simulate universal-scene-description-based (USD-based) 3-D workflows and applications.
추천 예제

Add, Build, and Remove Objects in Gazebo
Explore more in-depth interaction with the Gazebo® Simulator from MATLAB, such as creating simple models, adding links and joints to models, connecting models together, and applying forces to bodies.

Apply Forces and Torques in Gazebo
A collection of ways to apply forces and torques to models in the Gazebo® simulator.

Test Robot Autonomy in Simulation
Explore MATLAB control of the Gazebo® Simulator.
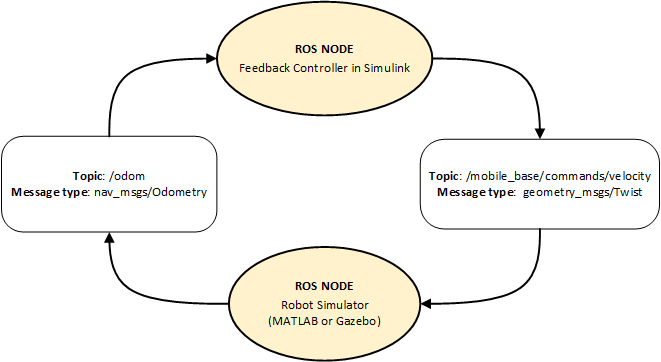
Feedback Control of a ROS-Enabled Robot
Use Simulink to control a simulated robot running in a separate ROS-based simulator.

Feedback Control of a ROS-Enabled Robot over ROS 2
Use Simulink to control a simulated robot running in a Gazebo robot simulator over ROS 2 network.
Track and Follow an Object
Explore the autonomous behavior that incorporates the Kinect® camera, where the algorithm involves the TurtleBot looking for a blue ball and then staying at a fixed distance from the ball.

Control the TurtleBot with Teleoperation
Demonstrates keyboard control of the TurtleBot through the use of the
ExampleHelperTurtleBotCommunicator class.

Obstacle Avoidance with TurtleBot and VFH
Use a TurtleBot with Vector Field Histograms to perform obstacle avoidance when driving a robot in an environment.

Fusion of Radar and Lidar Data Using ROS
Perform track-level sensor fusion on recorded LiDAR sensor data for a driving scenario recorded on a rosbag.

Generate a ROS Control Plugin from Simulink
Generate and build a ros_control plugin from a Simulink model.

Pick-and-Place Workflow in Unity 3D Using ROS
Set up an end-to-end pick-and-place workflow for a robotic manipulator like the Kinova® Gen3, and simulate the robot in the Unity game engine.

CARLA 시뮬레이터에서 Simulink와 CARLA ROS Bridge를 사용한 에고 차량 비상 제동
CARLA에서 Simulink를 사용한 에고 차량 비상 제동.
Control NVIDIA Carter Robot in Isaac Sim Using ROS 2
Publish ROS 2 messages from MATLAB to NVIDIA Carter robot and subscribe to the published topics.