지상 로봇
ROS Toolbox를 사용하면 시뮬레이션된 지상 로봇을 제어하는 독립 실행형 애플리케이션을 ROS 또는 ROS 2 네트워크를 실행하는 원격 장치의 ROS 지원 시뮬레이터에서 테스트하고 배포할 수 있습니다.
MATLAB® 또는 Simulink®에서 지상 로봇 제어용 애플리케이션을 만들고, 검증을 수행하고, C++ 코드 생성을 위해 최적화하고, 타깃 ROS 장치에 ROS 또는 ROS 2 노드로 배포할 수 있습니다. 또한 오프라인에서 데이터를 분석하거나 ROS 및 ROS 2 bag 파일에서 데이터를 재생하고 시각화할 수도 있습니다.
추천 예제

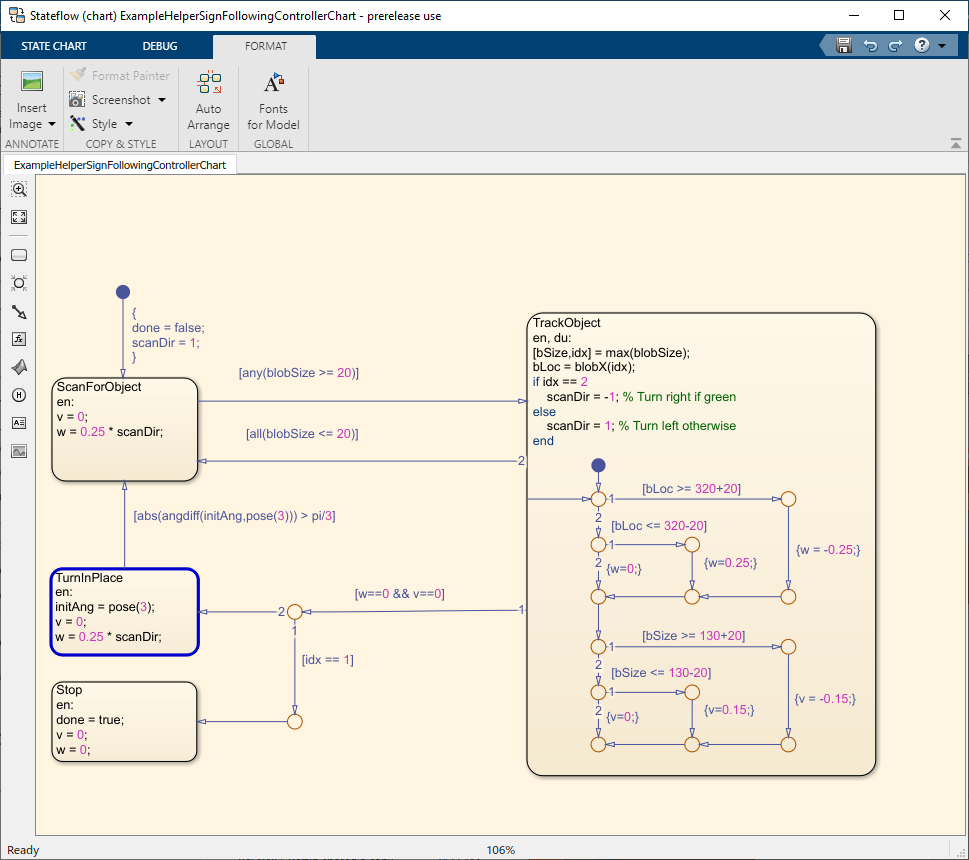
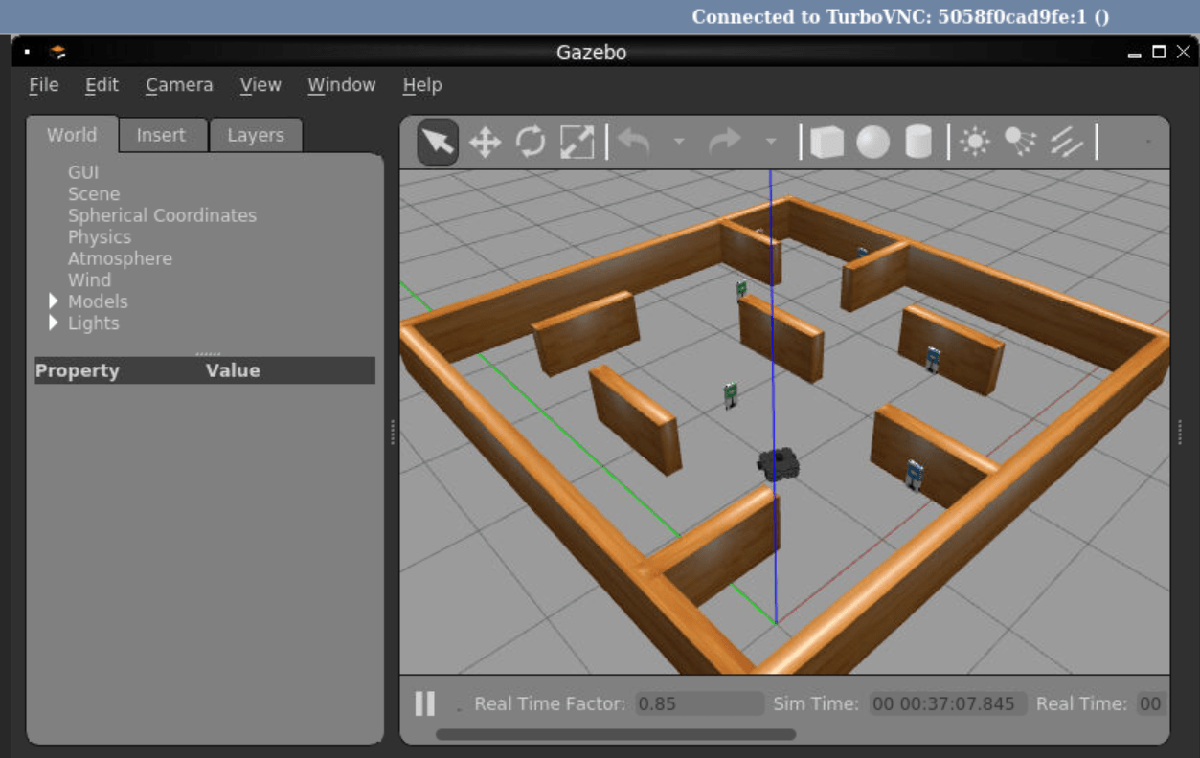
Sign Following Robot with ROS in MATLAB
Control a simulated robot running on a separate ROS-based simulator over a ROS network using MATLAB.
Sign-Following Robot with ROS 2 in MATLAB
Control a simulated robot running on a separate ROS-based simulator over ROS 2 network in MATLAB and generate a ROS 2 node for the control algorithm to deploy it to a remote device.
Sign-Following Robot with ROS in Simulink
Use Simulink to control a simulated robot running on a separate ROS-based simulator.
Sign-Following Robot with ROS 2 in Simulink
Use Simulink to control a simulated robot running on a separate ROS-based simulator over ROS 2 network.
Generate and Deploy ROS 2 Component Nodes for Sign Following Robot Using Simulink
Generate ROS 2 component nodes from Simulink® for handling perception and tracking logic of a sign-following robot. It also shows how to load and run the generated ROS 2 components in a docker container running the simulated robot in Gazebo.

Sign Following Robot with Time Synchronization Using ROS and Gazebo Co-Simulation
Use Simulink to enable synchronized simulation between ROS and the Gazebo robot simulator using the Gazebo Pacer block.

Sign Following Robot Using YOLOv2 Detection Algorithm with ROS in Simulink
Use Simulink to control a simulated robot running on a separate ROS-based simulator and generate CUDA-optimized code for the ROS node, from the Simulink model, and deploy it to the localhost device.

Test Robot Autonomy in Simulation
Explore MATLAB control of the Gazebo® Simulator.
Track and Follow an Object
Explore the autonomous behavior that incorporates the Kinect® camera, where the algorithm involves the TurtleBot® looking for a blue ball and then staying at a fixed distance from the ball.

Explore Basic Behavior of the TurtleBot
Explore basic autonomy with the TurtleBot, where the described behavior drives the robot forward and changes its direction when there is an obstacle.

Manage Quality of Service Policies in ROS 2 Application with TurtleBot
Demonstrates the best practices in managing Quality of Service (QoS) policies for an application using ROS 2.

Track Object Using ROS and Simulink on Raspberry Pi
Use Raspberry Pi® Blockset, ROS Toolbox, and a Raspberry Pi hardware board to track a green colored object. This example also shows how to use the Publish and Subscribe blocks to establish communication between the ROS node deployed on the Raspberry Pi hardware board and the ROS node in Simulink (host computer).