transformtraj
Generate trajectories between two transformations
Syntax
Description
Examples
Build transformations from two orientations and positions. Specify the time interval and vector of times for interpolating.
t0 = axang2tform([0 1 1 pi/4])*trvec2tform([0 0 0]); tF = axang2tform([1 0 1 6*pi/5])*trvec2tform([1 1 1]); tInterval = [0 1]; tvec = 0:0.01:1;
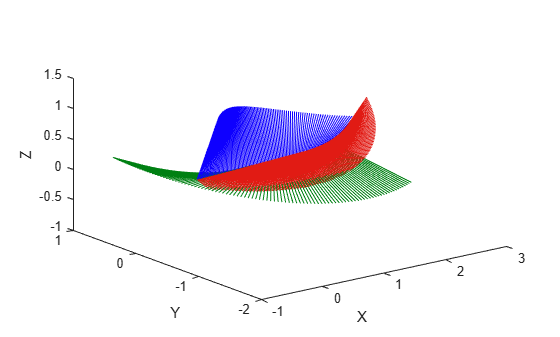
Interpolate between the points. Plot the trajectory using plotTransforms. Convert the transformations to quaternion rotations and linear transitions. The figure shows all the intermediate transformations of the coordinate frame.
[tfInterp, v1, a1] = transformtraj(t0,tF,tInterval,tvec); rotations = tform2quat(tfInterp); translations = tform2trvec(tfInterp); plotTransforms(translations,rotations) xlabel('X') ylabel('Y') zlabel('Z')
Build the first transformation from an axis-angle rotation and build the final transformation from both an axis-angle rotation and a translation.
t0 = se3([0 1 1 pi/4],"axang"); tF = se3([1 0 1 6*pi/5],"axang")*se3([1 1 1],"trvec");
Specify the time interval and vector of times for interpolating.
tInterval = [0 1]; tvec = 0:0.01:1;
Interpolate between the transformations. Plot the trajectory using plotTransforms.
[tfInterp] = transformtraj(t0,tF,tInterval,tvec); plotTransforms(tfInterp(1:10:end))

Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Lynch, Kevin M., and Frank C. Park. Modern Robotics: Mechanics, Planning, and Control. Cambridge University Press, 2017.
Extended Capabilities
Version History
Introduced in R2019aSee Also
bsplinepolytraj | contopptraj | cubicpolytraj | quinticpolytraj | rottraj | trapveltraj