insertRay
Insert ray from laser scan observation
Syntax
Description
The insertRay function updates the occupancy
probabilities of locations in an occupancy map by inserting lidar scan observations or
rays.
insertRay(
inserts one or more lidar scan sensor observations in the occupancy grid,
map,pose,scan,maxrange)map, using the input lidarScan object, scan, to get ray endpoints.
The ray endpoints are considered free space if the input scan ranges are below
maxrange. Cells observed as occupied are updated with
an observation of 0.7. All other points along the ray are treated as obstacle
free and updated with an observation of 0.4. Endpoints above
maxrange are not updated. NaN values
are ignored. This behavior correlates to the inverse sensor model.
insertRay(___,
inserts rays with updated probabilities given in the two-element vector,
invModel)invModel, that corresponds to obstacle-free and
occupied observations. Use any of the previous syntaxes to input the
rays.
Examples
Create an empty occupancy grid map.
map = occupancyMap(10,10,20);
Specify the pose of the vehicle, ranges, angles, and the maximum range of the laser scan.
pose = [5,5,0]; ranges = 3*ones(100,1); angles = linspace(-pi/2,pi/2,100); maxrange = 20;
Create a lidarScan object with the specified ranges and angles.
scan = lidarScan(ranges,angles);
Insert the laser scan data into the occupancy map.
insertRay(map,pose,scan,maxrange);
Show the map to see the results of inserting the laser scan.
show(map)
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/nav/win64/InsertLaserScansIntoOccupancyMapExample_01.png)
Check the occupancy of the spot directly in front of the vehicle.
getOccupancy(map,[8 5])
ans = 0.7000
Add a second reading and view the update to the occupancy values. The additional reading increases the confidence in the readings. The free and occupied values become more distinct.
insertRay(map,pose,scan,maxrange); show(map)
![Figure contains an axes object. The axes object with title Occupancy Grid, xlabel X [meters], ylabel Y [meters] contains an object of type image.](../../examples/nav/win64/InsertLaserScansIntoOccupancyMapExample_02.png)
getOccupancy(map,[8 5])
ans = 0.8448
Input Arguments
More About
The inverse sensor model determines how
values are set along a ray from a range sensor reading to the obstacles in the map.
You can customize this model by specifying different probabilities for free and
occupied locations in the invModel argument.
NaN range values are ignored. Range values greater than
maxrange are not updated.
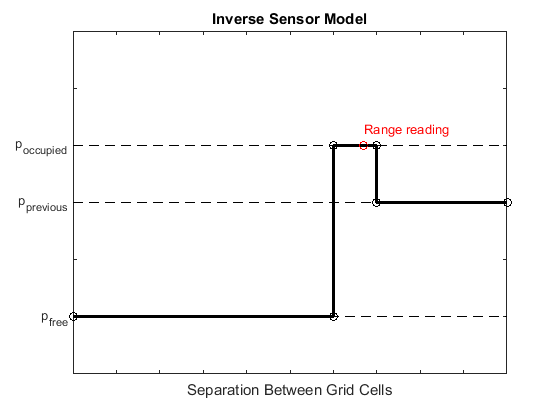
Grid locations that contain range readings are updated with the occupied probability. Locations before the reading are updated with the free probability. All locations after the reading are not updated.
Extended Capabilities
Version History
Introduced in R2019b