Texas Instruments
Texas Instruments 하드웨어에 배포할 수 있는 Motor Control Blockset™ 예제를 살펴봅니다.
추천 예제

개루프 제어에서 3상 AC 모터를 구동하고 ADC 오프셋 보정하기
이 예제에서는 개루프 제어(스칼라 제어 또는 볼트/헤르츠 제어라고도 함)를 사용하여 모터를 구동합니다. 이 기법은 모터의 피드백을 사용하지 않고 고정자 전압과 주파수를 변경하여 회전자 속도를 제어합니다. 이 기법을 사용하여 하드웨어 연결의 무결성을 검사할 수 있습니다. 속도가 일정한 개루프 제어 응용 사례에서는 고정 주파수 모터 전원을 사용합니다. 속도 조정이 가능한 개루프 제어 응용 사례에서는 회전자 속도를 제어하기 위한 가변 주파수 전원이 필요합니다. 일정한 고정자 자기 플럭스를 보장하려면 공급 전압 진폭을 그 주파수에 비례하도록 유지하십시오.

Estimate PMSM Parameters Using Parameter Estimation Blocks
Uses the parameter estimation blocks provided by Motor Control Blockset™ to estimate these parameters of a permanent magnet synchronous motor (PMSM) with a quadrature encoder sensor:
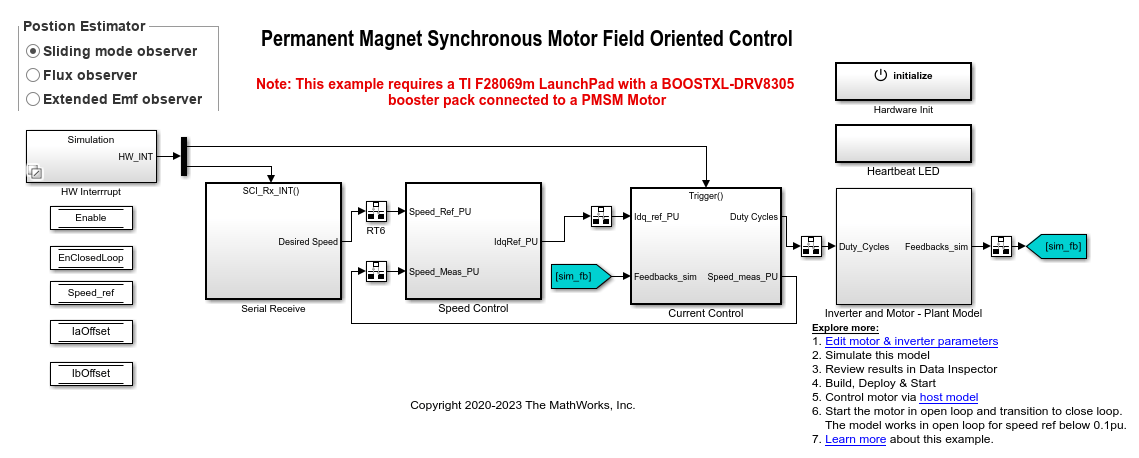
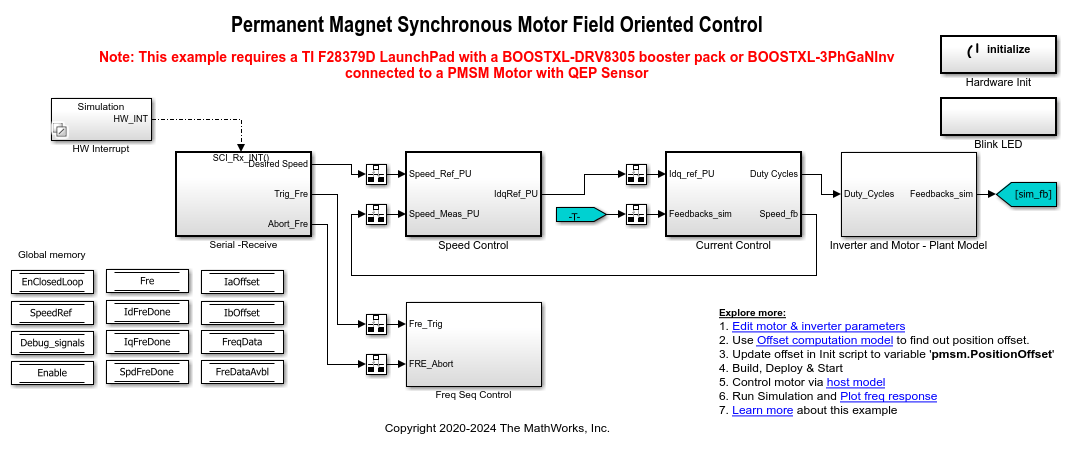
PMSM의 센서리스 자속 기준 제어
이 예제에서는 3상 영구 자석 동기 모터(PMSM)의 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. FOC에 대한 자세한 내용은 자속 기준 제어(FOC) 항목을 참조하십시오.

Hall Offset Calibration for PMSM
Calculates the offset between the rotor direct axis (d-axis) and position detected by the Hall sensor. The field-oriented control (FOC) algorithm needs this position offset to run the permanent magnet synchronous motor (PMSM) correctly. To compute the offset, the target model runs the motor in the open-loop condition. The model uses a constant (voltage along the stator's
d-axis) and a zero (voltage along the stator's
q-axis) to run the motor (at a low constant speed) by using a position or ramp generator. When the position or ramp value reaches zero, the corresponding rotor position is the offset value for the Hall sensors.

홀 센서를 사용한 PMSM의 자속 기준 제어
이 예제에서는 3상 영구 자석 동기 모터(PMSM)의 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. FOC 알고리즘은 회전자 위치 피드백이 필요하며 이는 홀 센서를 통해 구합니다. FOC에 대한 자세한 내용은 자속 기준 제어(FOC) 항목을 참조하십시오.

Quadrature Encoder Offset Calibration for PMSM
Calculates the offset between the d-axis of the rotor and encoder index pulse position as detected by the quadrature encoder sensor. The control algorithm (available in the field-oriented control and parameter estimation examples) uses this offset value to compute an accurate and precise position of the d-axis of rotor. The controller needs this position to implement the field-oriented control (FOC) correctly in the rotor flux reference frame (d-q reference frame), and therefore, run the permanent magnet synchronous motor (PMSM) correctly.

쿼드라쳐 인코더를 사용한 PMSM의 자속 기준 제어
이 예제에서는 3상 영구 자석 동기 모터(PMSM)의 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. FOC 알고리즘에는 회전자 위치 피드백이 필요하며, 쿼드라쳐 인코더 센서를 통해 이 피드백을 구합니다. FOC에 대한 자세한 내용은 자속 기준 제어(FOC) 항목을 참조하십시오.

PMSM의 약계자 제어(MTPA 사용)
이 예제에서는 3상 영구 자석 동기 모터(PMSM)의 토크 및 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. FOC 알고리즘에는 회전자 위치 피드백이 필요하며, 쿼드라쳐 인코더 센서를 통해 이 피드백을 구합니다. FOC에 대한 자세한 내용은 자속 기준 제어(FOC) 항목을 참조하십시오.
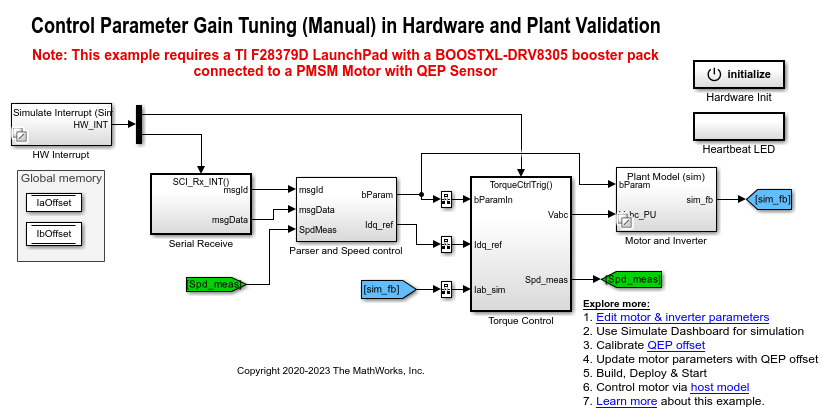
Tune Control Parameter Gains in Hardware and Validate Plant
Uses field-oriented control (FOC) to run a three-phase permanent magnet synchronous motor (PMSM) in different modes of operation for plant validation. FOC algorithm implementation needs the real-time feedback of the rotor position. This example uses a quadrature encoder sensor to measure the rotor position. For details about FOC, see 자속 기준 제어(FOC).

SI 단위를 사용한 PMSM의 자속 기준 제어
이 예제에서는 3상 영구 자석 동기 모터(PMSM)의 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. 그리고 이 예제의 FOC 알고리즘은 수량에 대한 per-unit 표현 대신(per-unit 시스템에 대한 자세한 내용은 Per-Unit System 항목 참조) 신호에 대한 SI 단위를 사용하여 계산을 수행합니다. 다음은 신호와 해당하는 SI 단위입니다.

Control PMSM Loaded with Dual Motor (Dyno)
Uses field-oriented control (FOC) to control two three-phase permanent magnet synchronous motors (PMSM) coupled in a dyno setup. Motor 1 runs in the closed-loop speed control mode. Motor 2 runs in the torque control mode and loads Motor 1 because they are mechanically coupled. You can use this example to test a motor in different load conditions.
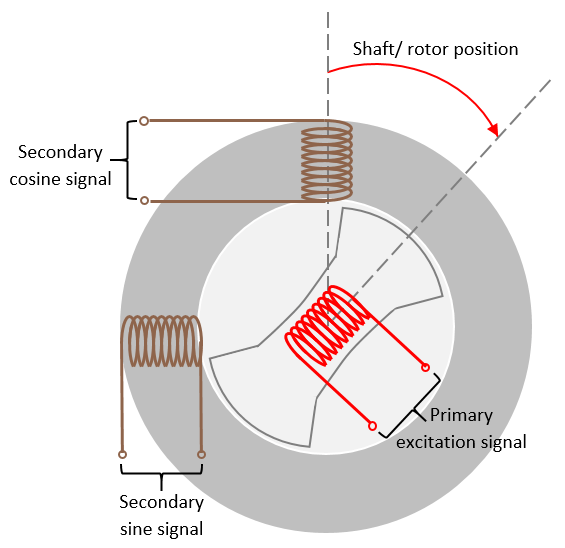
Monitor Resolver Using Serial Communication
Use the resolver sensor to measure the rotor position. The resolver consists of two stator (secondary) windings placed orthogonally around the resolver rotor (primary) winding. After you mount the resolver sensor over a PMSM, the resolver rotor winding rotates with the shaft of the running motor. Meanwhile, the controller provides a fixed-frequency excitation signal (alternating sinusoidal or square pulse) to the primary winding.

Model Switching Dynamics in Inverter Using Simscape Electrical
Uses field-oriented control (FOC) to control the speed of a three-phase permanent magnet synchronous motor (PMSM). It gives you the option to use these Simscape™ Electrical™ blocks as an alternative to the Average Value Inverter block in Motor Control Blockset™:

Tune PI Controllers Using Field Oriented Control Autotuner
Computes the gain values of PI controllers available in the speed and current control loops by using the Field Oriented Control Autotuner block. For details about this block, see Field Oriented Control Autotuner. For details about field-oriented control, see 자속 기준 제어(FOC).

Tune PI Controllers (in Field-Weakening Control Mode) Using FOC Autotuner Block
Uses the Field Oriented Control Autotuner block to compute the gain values of the PI controllers available in the speed, current, and flux control loops of a field-weakening control algorithm. For details about this block, see Field Oriented Control Autotuner.

Position Control of PMSM Using Quadrature Encoder
Implements the field-oriented control (FOC) technique to control the position of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which it obtains from a quadrature encoder sensor.
MATLAB Project for FOC of PMSM with Quadrature Encoder
This MATLAB® project provides a motor control example model that uses field-oriented control (FOC) to run a three-phase permanent magnet synchronous motor (PMSM) in different modes of operation. Implementing the FOC algorithm needs real-time rotor position feedback. This example uses a quadrature encoder sensor to measure the rotor position. For details about FOC, see 자속 기준 제어(FOC).
Frequency Response Estimation of PMSM Using Field-Oriented Control
Performs frequency response estimation (FRE) of a plant model running a three-phase permanent magnet synchronous motor (PMSM). When you simulate or run the model on the target hardware, the model runs tests to estimate the frequency response as seen by each PI controller (also known as raw FRE data) and plots the FRE data to provide a graphical representation of the plant model dynamics.

Integrate MCU Scheduling and Peripherals in Motor Control Application
Identify and resolve issues with respect to peripheral settings and task scheduling early during development.

Partition Motor Control for Multiprocessor MCUs
Partition real-time motor control application on to multiple processors to achieve design modularity and improved control performance.

Estimate Initial Rotor Position Using Pulsating High-Frequency and Dual-Pulse Methods
Estimates the initial position (in electrical radians) of a stationary interior PMSM by using pulsating high-frequency (PHF) injection and dual pulse (DP) techniques.

Field-Oriented Control (FOC) of PMSM Using Hardware-in-the-Loop (HIL) Simulation
Uses hardware-in-the-loop (HIL) simulation to implement the field-oriented control (FOC) algorithm to control the speed of a three-phase permanent magnet synchronous motor (PMSM). The FOC algorithm requires rotor position feedback, which is obtained by a quadrature encoder sensor. For more information on FOC, see 자속 기준 제어(FOC).

Direct Torque Control of PMSM Using Quadrature Encoder or Sensorless Flux Observer
Implements direct torque control (DTC) technique to control the speed of a three-phase permanent magnet synchronous motor (PMSM). Direct Torque Control (DTC) is a vector motor control technique that implements motor speed control by directly controlling the flux and torque of the motor. The example algorithm needs motor currents and position feedback from PMSM. It uses space vector pulse-width modulation (DTC-SVPWM) variant of DTC, which uses space vector modulation (SVM) to produce the pulse-width modulation (PWM) duty cycles that are used by the inverter. For more details about the DTC-SVPWM algorithm used in this example, see 직접 토크 제어(DTC).

Run Field Oriented Control of PMSM Using Model Predictive Control
Uses Model Predictive Control (MPC) to control the speed of a three-phase permanent magnet synchronous motor (PMSM).

PIL 테스트를 사용한 코드 검증 및 프로파일링
이 예제에서는 Texas Instruments® LAUNCHXL-F28379D 하드웨어 보드의 PIL 프로파일링을 설명합니다. PIL(processor-in-the-loop) 시뮬레이션에서 제어 알고리즘은 타깃 하드웨어에서 실행되지만 플랜트 모델은 호스트 컴퓨터에서 실행됩니다. 플랜트 모델은 제어기의 입력 신호와 출력 신호를 시뮬레이션하고 직렬 통신 인터페이스를 사용하여 제어기와 통신합니다. 이 기능을 통해 PIL 시뮬레이션을 사용하여 타깃 하드웨어에서의 실행 시간을 확인한 다음 호스트 컴퓨터에서의 모델 시뮬레이션 실행 시간과 비교할 수 있습니다.

Implement PMSM Speed Control Using Active Disturbance Rejection Control
Implement active disturbance rejection control (ADRC) of the speed of a permanent magnet synchronous motor (PMSM) modeled in Simulink® using the Active Disturbance Rejection Control (Simulink Control Design) block. You can use the example to implement field-oriented control (FOC) using either a proportional integral (PI) or ADRC-based controller to run the motor in the speed control mode. Therefore, you can compare the performance of the PI and ADRC controllers.

Swap Motors with Single Model Deployment of Sensor-Based FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using position-sensor-based field-oriented control (FOC). Industrial drives enable you to swap motors in real-time without repeated deployment of code. An industrial drive setup needs a fixed inverter and software that has the ability to adapt the control algorithm according to the new motor using only the updated nameplate parameters.
Swap Motors with Single Deployment of Sensorless FOC Algorithm
Run a permanent magnet synchronous motor (PMSM) in an industrial drive application setup using a sensorless field-oriented control (FOC) algorithm. The example uses a sensorless Flux Observer to estimate the motor position. Industrial drives enable you to replace a motor with a new one without repeated deployment of code. An industrial drive setup needs only nameplate parameters to adapt the software to the new motor.

Generate Motor Control Models for Selected Algorithm and Hardware
Use Motor Control Blockset™ to generate a Simulink® model that is configured for a specific hardware and motor control technique.

센서 피드백을 사용한 BLDC 모터의 6단계 정류
6단계 정류 기법을 사용하여 3상 BLDC 모터의 회전 속도와 회전 방향을 제어합니다.

BLDC 모터의 홀 센서 시퀀스 보정
이 예제에서는 개루프 제어에서 회전자의 위치 0을 기준으로 홀 센서 시퀀스를 계산합니다. 이 워크플로를 사용하면 홀 센서에 레이블을 지정할 필요 없이 6단계 정류를 사용하여 모터를 회전시키거나 스위칭 시퀀스를 도출할 수 있습니다. 이 예제를 실행하여 홀 시퀀스를 구하고 이 홀 시퀀스를 Six Step Commutation 블록과 함께 사용하여 센서 피드백을 사용한 BLDC 모터의 6단계 정류 예제에 설명된 대로 폐루프에서 모터를 구동합니다.

Estimate Induction Motor Parameters Using Parameter Estimation Blocks
Uses the parameter estimation blocks provided by Motor Control Blockset™ to estimate these parameters of an AC induction motor (ACIM):

속도 센서를 사용한 유도 모터의 자속 기준 제어
이 예제에서는 3상 AC 유도 모터(ACIM)의 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. FOC 알고리즘에는 회전자 속도 피드백이 필요하며, 이 예제에서는 쿼드라쳐 인코더 센서를 사용하여 이 피드백을 구합니다. FOC에 대한 자세한 내용은 자속 기준 제어(FOC) 항목을 참조하십시오.

유도 모터의 센서리스 자속 기준 제어
이 예제는 센서리스 위치 추정을 사용해서 3상 AC 유도 모터(ACIM)의 속도를 제어하는 자속 기준 제어(FOC) 기법을 구현합니다. FOC에 대한 자세한 내용은 자속 기준 제어(FOC) 항목을 참조하십시오.

Commutation of SRM Using Sensor Feedback
Implements a commutation system to control the speed of a three-phase 12/8 switched reluctance motor (SRM).

Dwell Angle Computation for SRM Speed Control
Compute the dwell angle of a 12/8 switched reluctance motor (SRM) online (while the motor runs). The example then uses the computed dwell angle along with a delta controller to control the motor speed.
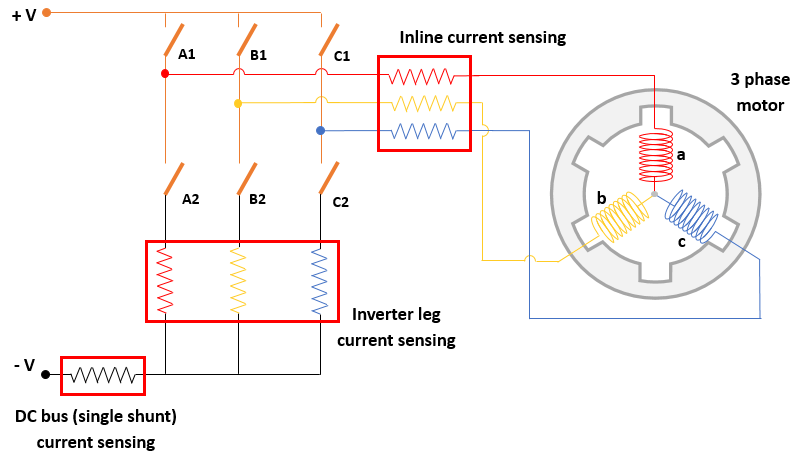
Sensorless Field-Oriented Control of PMSM Using DC Shunt Current Sensing
Implement sensorless field-oriented control (FOC) using only a single DC bus-based current measurement to run a permanent magnet synchronous motor (PMSM).

Sensorless Field-Oriented Control of PMSM Using I-F Control-Based Startup
Implements field-oriented control (FOC) using sensorless position estimation and I-F control-based startup to control the speed of a three-phase permanent magnet synchronous motor (PMSM).

Field-Oriented Control of PMSM Using Position Estimated by Neural Network
Implement field-oriented control (FOC) of a permanent magnet synchronous motor (PMSM) using a rotor position estimated by an autoregressive neural network (ARNN) trained with Deep Learning Toolbox™.

Run-Time Parameter Estimation of PMSM Using Sensor Feedback
Estimate the parameters of a permanent magnet synchronous motor (PMSM) at run-time. The example estimates the following PMSM parameters by running tests while the motor runs using a closed-loop field-oriented control (FOC) algorithm:
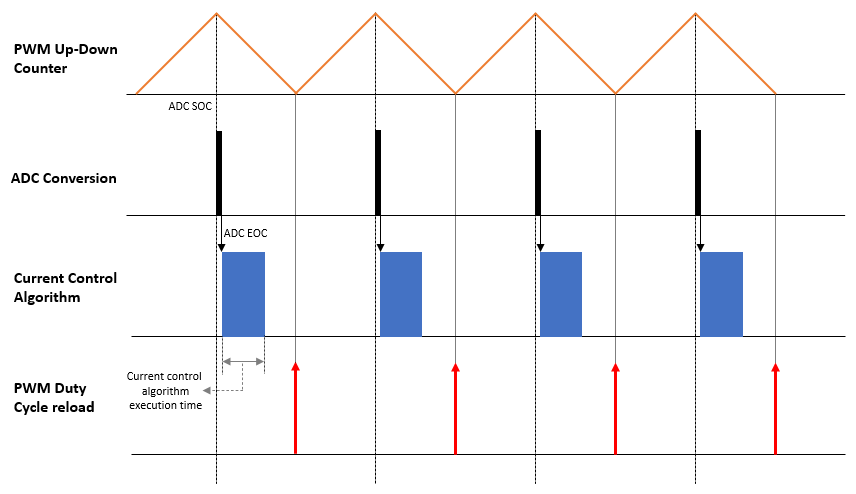
Motor Control Architectures Based on Different Current Sampling and PWM Frequencies
Enables you to implement different motor control architectures that use non-identical sampling rates for ADC conversion, PWM, and current controller algorithm to run a permanent magnet synchronous motor (PMSM) using field-oriented control (FOC).

Detect Unbalanced Motor by Using Neural Network
Detect a mechanically unbalanced spinning motor by using a neural network (NN) developed using Deep Learning Toolbox™.