최근접이웃 탐색
MATLAB에는 문제의 차원 수에 따른 최근접이웃 계산 방식이 여러 개 있습니다.
2차원 탐색과 3차원 탐색의 경우,
triangulation클래스에서 제공하고delaunayTriangulation클래스에서 상속하는nearestNeighbor메서드를 사용합니다.4차원 이상의 경우, 삼각분할을 생성하는
delaunayn함수와 탐색을 수행하는 상호 보완적인dsearchn함수를 사용합니다. 이러한 N차원 함수는 2차원과 3차원을 지원하지만, 삼각분할 탐색 메서드만큼 보편적이거나 효율적이지는 않습니다.
이 예제에서는 delaunayTriangulation을 사용하여 2차원에서 최근접이웃 탐색을 수행하는 방법을 보여줍니다.
먼저 15개의 임의 점 집합을 만듭니다.
X = [3.5 8.2; 6.8 8.3; 1.3 6.5; 3.5 6.3; 5.8 6.2; 8.3 6.5;... 1 4; 2.7 4.3; 5 4.5; 7 3.5; 8.7 4.2; 1.5 2.1; 4.1 1.1; ... 7 1.5; 8.5 2.75];
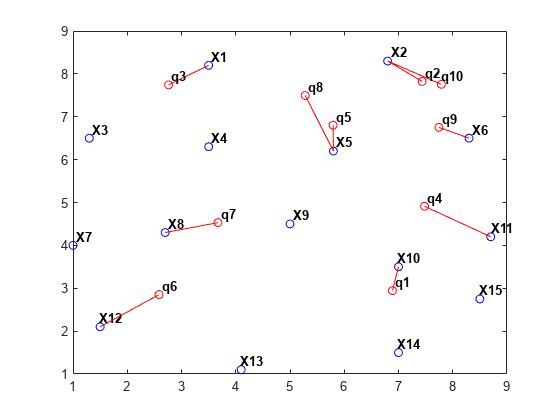
점을 플로팅하고 주석을 추가하여 ID 레이블을 표시합니다.
plot(X(:,1),X(:,2),'ob') hold on vxlabels = arrayfun(@(n) {sprintf("X%d",n)},(1:15)'); Hpl = text(X(:,1) + 0.2,X(:,2) + 0.2,vxlabels, ... FontWeight="bold",HorizontalAlignment="center", ... BackgroundColor="none"); hold off
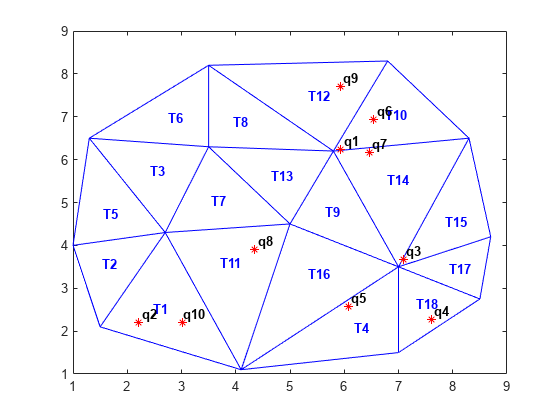
이들 점으로 들로네 삼각분할(Delaunay Triangulation)을 만듭니다.
dt = delaunayTriangulation(X);
쿼리 점을 만들고, nearestNeighbor 메서드를 사용하여 각 쿼리 점에 대응하는 X에서의 최근접이웃 인덱스를 구합니다.
numq = 10;
rng(0,"twister");
q = 2 + rand(numq,2)*6;
xi = nearestNeighbor(dt,q);플롯에 쿼리 점을 추가하고, 각 쿼리 점과 이에 대한 최근접이웃을 잇는 선분을 추가합니다.
xnn = X(xi,:); hold on plot(q(:,1),q(:,2),"or"); plot([xnn(:,1) q(:,1)]',[xnn(:,2) q(:,2)]',"-r"); vxlabels = arrayfun(@(n) {sprintf("q%d",n)},(1:numq)'); Hpl = text(q(:,1) + 0.2,q(:,2) + 0.2,vxlabels, ... FontWeight="bold",HorizontalAlignment="center", ... BackgroundColor="none"); hold off
3차원에서 최근접이웃 탐색을 수행하는 것은 delaunayTriangulation을 기반으로 한 2차원 예제의 직접적인 연장선상에 있습니다.
4차원 이상의 경우, 다음 예제에 표시된 대로 delaunayn 함수와 dsearchn 함수를 사용합니다.
4차원에서 임의의 샘플 점을 만들고 delaunayn을 사용하여 점을 삼각분할합니다.
X = 20*rand(50,4)-10; tri = delaunayn(X);
쿼리 점을 만들고, 각 쿼리 점에 대해 dsearchn 함수를 사용하여 X에서의 최근접이웃 인덱스를 구합니다.
q = rand(5,4); xi = dsearchn(X,tri, q);
nearestNeighbor 메서드와 dsearchn 함수를 사용하면 각 쿼리 점과 해당 최근접이웃 점 사이의 유클리드 거리를 선택적 인수로 반환할 수 있습니다. 4차원 예제에서는 다음과 같이 거리 dnn을 계산할 수 있습니다.
[xi,dnn] = dsearchn(X,tri,q);