pointLocation
Triangle or tetrahedron enclosing point
Syntax
Description
Examples
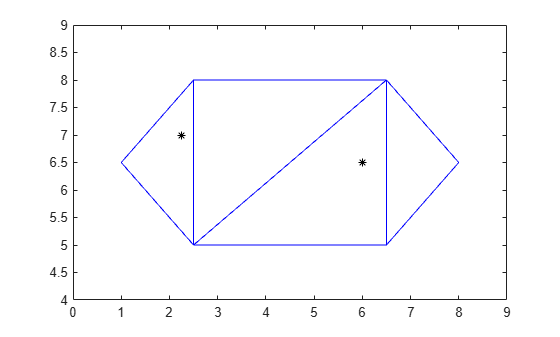
Find the triangles of a triangulation that enclose a set of query points.
Define the points and connectivity of a triangulation.
TP = [2.5 8.0;
6.5 8.0;
2.5 5.0;
6.5 5.0;
1.0 6.5;
8.0 6.5];
C = [5 3 1;
3 2 1;
3 4 2;
4 6 2];
TR = triangulation(C,TP);Define two query points.
P = [2.25 7; 6 6.5];
Plot the triangulation and the query points.
triplot(TR) hold on plot(P(:,1),P(:,2),"k*") ylim([4 9]) xlim([0 9])
Determine the IDs of the triangles that enclose each query point.
ID = pointLocation(TR,P)
ID = 2×1
1
3
Highlight the triangles that enclose the query points in red.
triplot(TR.ConnectivityList(ID,:),TP(:,1),TP(:,2),"r")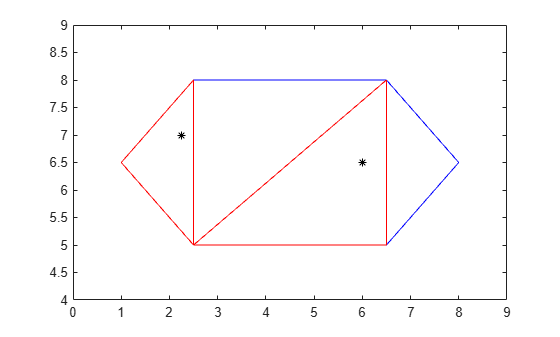
Find the tetrahedra of a 3-D triangulation that enclose a set of query points.
Create a Delaunay triangulation from a set of 3-D points.
rng default
x = rand([20 1]);
y = rand([20 1]);
z = rand([20 1]);
TR = delaunayTriangulation(x,y,z);Find the IDs of the tetrahedra that enclose the query points, and compute the barycentric coordinates of the query points.
P = [0.7 0.6 0.3;
0.5 0.5 0.5];
[ID,B] = pointLocation(TR,P)ID = 2×1
9
8
B = 2×4
0.2046 0.0893 0.5721 0.1340
0.1900 0.1495 0.6422 0.0183
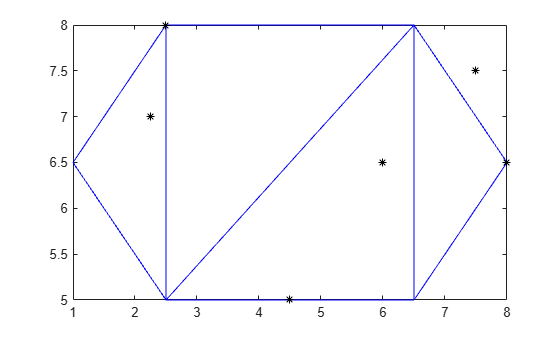
Determine which query points are located on edges and vertices of the triangles of a 2-D triangulation.
Define the points and connectivity of a triangulation.
TP = [2.5 8.0;
6.5 8.0;
2.5 5.0;
6.5 5.0;
1.0 6.5;
8.0 6.5];
C = [5 3 1;
3 2 1;
3 4 2;
4 6 2];
TR = triangulation(C,TP);Define the query points.
P = [2.25 7;
6 6.5;
2.5 8.0;
4.5 5.0;
8 6.5
7.5 7.5];Find the barycentric coordinates of each query point with respect to its enclosing triangle. For points outside the triangulation, pointLocation returns NaN.
[~,B] = pointLocation(TR,P)
B = 6×3
0.1667 0.2500 0.5833
0.1250 0.3750 0.5000
0 0 1.0000
0.5000 0.5000 0
0 1.0000 0
NaN NaN NaN
Use the barycentric coordinates to determine if a query point lies on a vertex, on an edge, in a triangle, or outside the triangulation. If a query point is located on a vertex, one of its barycentric coordinates is 1 and the other coordinates are 0. If a query point is located on an edge but does not coincide with a vertex, one of its barycentric coordinates is 0 and none of the other coordinates is 1. For query points outside of the triangulation, the barycentric coordinates are NaN.
M = size(B,1); loc = cell(M,2); tol = 1e-10; for i = 1:M b = B(i,:); loc{i,1} = P(i,1:2); if ismembertol(1,b,tol) loc{i,2} = "Vertex"; elseif ismembertol(0,b,tol) loc{i,2} = "Edge"; elseif isnan(B(i)) loc{i,2} = "Outside"; else loc{i,2} = "Triangle"; end end loc
loc=6×2 cell array
{[ 2.2500 7]} {["Triangle"]}
{[ 6 6.5000]} {["Triangle"]}
{[ 2.5000 8]} {["Vertex" ]}
{[ 4.5000 5]} {["Edge" ]}
{[ 8 6.5000]} {["Vertex" ]}
{[7.5000 7.5000]} {["Outside" ]}
Plot the triangulation and the query points.
triplot(TR) hold on plot(P(:,1),P(:,2),'k*')