radarEmitter
Radar signals and interferences generator
Description
The radarEmitter
System object™ creates an emitter to simulate radar emissions. You can use the
radarEmitter object in a scenario that detects and tracks moving
and stationary platforms. Construct a scenario using trackingScenario.
A radar emitter changes the look angle between updates by stepping the mechanical and
electronic position of the beam in increments of the angular span specified in the
FieldOfView property. The radar scans the total region in
azimuth and elevation defined by the radar mechanical and electronic scan limits,
MechanicalScanLimits and
ElectronicScanLimits, respectively. If the scan limits for
azimuth or elevation are set to [0 0], then no scanning is performed
along that dimension for that scan mode. If the maximum mechanical scan rate for azimuth
or elevation is set to zero, then no mechanical scanning is performed along that
dimension.
To generate radar detections:
Create the
radarEmitterobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
emitter = radarEmitter(EmitterIndex)
emitter = radarEmitter(EmitterIndex,'No scanning')radarEmitter that
stares along the radar antenna boresight direction. No mechanical or
electronic scanning is performed. This syntax sets the
ScanMode property to 'No
scanning'.
emitter = radarEmitter(EmitterIndex,'Raster')radarEmitter object
that mechanically scans a raster pattern. The raster span is 90° in azimuth
from –45° to +45° and in elevation from the horizon to 10° above the
horizon. See Convenience Syntaxes for the
properties set by this syntax.
emitter = radarEmitter(EmitterIndex,'Rotator')radarEmitter object
that mechanically scans 360° in azimuth by mechanically rotating the antenna
at a constant rate. When you set HasElevation to
true, the radar antenna mechanically points towards
the center of the elevation field of view. See Convenience Syntaxes for the
properties set by this syntax.
emitter = radarEmitter(EmitterIndex,'Sector')radarEmitter object
that mechanically scans a 90° azimuth sector from –45° to +45°. Setting
HasElevation to true, points the
radar antenna towards the center of the elevation field of view. You can
change the ScanMode to 'Electronic'
to electronically scan the same azimuth sector. In this case, the antenna is
not mechanically tilted in an electronic sector scan. Instead, beams are
stacked electronically to process the entire elevation spanned by the scan
limits in a single dwell. See Convenience Syntaxes for the
properties set by this syntax.
emitter = radarEmitter(___,PropertyName=Value)radarEmitter object with each specified
PropertyName set to the corresponding
Value. If you specify the emitter index using the
EmitterIndex property, you can omit the
EmitterIndex input. You can specify additional
pairs of arguments in any order as
(PropertyName1=Value1, …
,PropertyNameN=ValueN).
Properties
Usage
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create an emitter that stares from the front of a jammer.
Create a platform to mount the jammer on.
plat = struct( ... 'PlatformID', 1, ... 'Position', [0 0 0]);
Create an emitter that stares from the front of the jamming platform.
jammer = radarEmitter(1,'No scanning');Emit the jamming waveform.
time = 0; sig = jammer(plat, time)
sig =
radarEmission with properties:
PlatformID: 1
EmitterIndex: 1
OriginPosition: [0 0 0]
OriginVelocity: [0 0 0]
Orientation: [1×1 quaternion]
FieldOfView: [1 5]
CenterFrequency: 300000000
Bandwidth: 3000000
WaveformType: 0
ProcessingGain: 0
PropagationRange: 0
PropagationRangeRate: 0
EIRP: 100
RCS: 0
Model an radar emitter for an air traffic control tower.
Simulate one full rotation of the tower.
rpm = 12.5; scanrate = rpm*360/60; fov = [1.4;5]; updaterate = scanrate/fov(1);
Create a trackingScenario object to manage the motion of the platforms.
scene = trackingScenario('UpdateRate', updaterate, ... 'StopTime', 60/rpm);
Add a platform to the scenario to host the air traffic control tower.
tower = platform(scene);
Create an emitter that provides 360 degree surveillance.
radarTx = radarEmitter(1,'Rotator', ... 'UpdateRate',updaterate, ... 'MountingLocation',[0 0 -15], ... 'MaxMechanicalScanRate',scanrate, ... 'FieldOfView',fov);
Attach the emitter to the tower.
tower.Emitters = radarTx
tower =
Platform with properties:
PlatformID: 1
ClassID: 0
Position: [0 0 0]
Orientation: [0 0 0]
Dimensions: [1×1 struct]
Mesh: [1×1 extendedObjectMesh]
Trajectory: [1×1 kinematicTrajectory]
PoseEstimator: [1×1 insSensor]
Emitters: {[1×1 radarEmitter]}
Sensors: {}
Signatures: {[1×1 rcsSignature] [1×1 irSignature] [1×1 tsSignature]}
Rotate the antenna and emit the radar waveform.
loggedData = struct('Time', zeros(0,1), ... 'Orientation', quaternion.zeros(0, 1)); while advance(scene) time = scene.SimulationTime; txSig = emit(tower, time); loggedData.Time = [loggedData.Time; time]; loggedData.Orientation = [loggedData.Orientation; ... txSig{1}.Orientation]; end
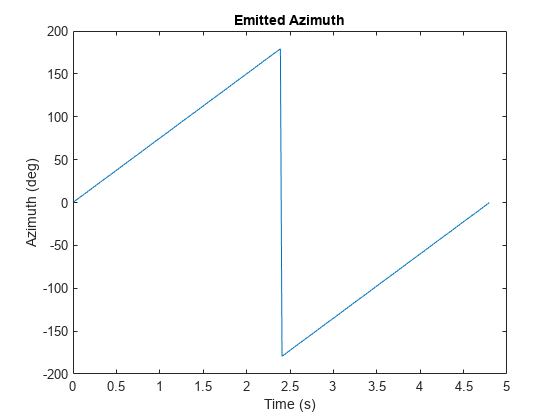
Plot the emitter azimuth direction.
angles = eulerd(loggedData.Orientation, 'zyx', 'frame'); plot(loggedData.Time, angles(:,1)) title('Emitted Azimuth') xlabel('Time (s)') ylabel('Azimuth (deg)')
More About
Extended Capabilities
Version History
Introduced in R2018b