trackingScenario
Create tracking scenario
Description
trackingScenario creates a tracking scenario
object. A tracking scenario simulates a 3-D arena containing multiple platforms.
Platforms represent anything that you want to simulate, such as aircraft, ground
vehicles, or ships. Some platforms carry sensors, such as radar, sonar, or infrared.
Other platforms act as sources of signals or reflect signals. Platforms can also include
stationary obstacles that can influence the motion of other platforms. Platforms can be
modeled as points or cuboids by specifying the 'Dimension' property
when calling platform.
Platforms can have aspect-dependent properties including radar cross-section or sonar
target strength. You can populate a tracking scenario by calling the platform
method for each platform you want to add. Platforms are Platform
objects. You can create trajectories for any platform using the kinematicTrajectory, waypointTrajectory, or geoTrajectory System objects.
After creating the scenario, run the simulation by calling the advance
object function.
Creation
sc = trackingScenario creates an empty tracking scenario with
default property values. In this case, you can specify platform trajectories in the
scenario as Cartesian states using the kinematicTrajectory or waypointTrajectory objects.
sc = trackingScenario('IsEarthCentered',
creates an empty Earth-centered tracking scenario with default property values. In this
case, you can specify platform trajectories in the scenario as geodetic states using the
true)geoTrajectory object.
sc = trackingScenario(Name,Value)trackingScenario object with properties
using one or more Name,Value pair arguments.
Name is a property name and Value is the
corresponding value. Name must appear inside single quotes
(''). You can specify several name-value pair arguments in any
order as Name1,Value1,...,NameN,ValueN. Any unspecified properties
take default values.
Properties
Object Functions
platform | Add platform to tracking scenario |
groundSurface | Add surface to tracking scenario |
advance | Advance tracking scenario simulation by one time step |
restart | Restart tracking scenario simulation |
record | Run tracking scenario and record platform, sensor, and emitter information |
emit | Collect emissions from emitters in tracking scenario |
propagate | Propagate emissions in tracking scenario |
detect | Collect detections from all the sensors in tracking scenario |
lidarDetect | Report point cloud detections from all lidar sensor in
trackingScenario |
platformPoses | Positions, velocities, and orientations of all platforms in tracking scenario |
platformProfiles | Profiles of platforms in tracking scenario |
coverageConfig | Sensor and emitter coverage configuration |
play | Play tracking scenario simulation in player |
perturb | Apply perturbations to tracking scenario |
clone | Create copy of tracking scenario |
Examples
Construct a tracking scenario with 2 Hz sample rate.
sc = trackingScenario(UpdateRate=2);
Create two platforms with different appearance and disappearance time. Run the simulation and display platform position.
platfm1 = platform(sc,Trajectory=waypointTrajectory([0 0 0;10 -10 0],[2.5;4.5])); platfm2 = platform(sc,Trajectory=waypointTrajectory([0 0 0;-24 24 0],[1;5])); while advance(sc) poses = platformPoses(sc); platformIDs = [poses.PlatformID]; if ismember(platfm1.PlatformID, platformIDs) idx = find(platformIDs == platfm1.PlatformID); msg1 = ": Platform 1 position " + mat2str(poses(idx).Position) + "; "; else msg1 = ": Platform 1 not defined; "; end if ismember(platfm2.PlatformID, platformIDs) idx = find(platformIDs == platfm2.PlatformID); msg2 = "Platform 2 position " + mat2str(poses(idx).Position) + "."; else msg2 = "Platform 2 not defined."; end disp("t=" + sc.SimulationTime + msg1 + msg2); end
t=0: Platform 1 not defined; Platform 2 not defined. t=0.5: Platform 1 not defined; Platform 2 not defined. t=1: Platform 1 not defined; Platform 2 position [0 0 0]. t=1.5: Platform 1 not defined; Platform 2 position [-3 3 0]. t=2: Platform 1 not defined; Platform 2 position [-6 6 0]. t=2.5: Platform 1 position [0 0 0]; Platform 2 position [-9 9 0]. t=3: Platform 1 position [2.5 -2.5 0]; Platform 2 position [-12 12 0]. t=3.5: Platform 1 position [5 -5 0]; Platform 2 position [-15 15 0]. t=4: Platform 1 position [7.5 -7.5 0]; Platform 2 position [-18 18 0]. t=4.5: Platform 1 position [10 -10 0]; Platform 2 position [-21 21 0]. t=5: Platform 1 not defined; Platform 2 position [-24 24 0].
Construct a tracking scenario with two platforms that follow different trajectories.
sc = trackingScenario('UpdateRate',100.0,'StopTime',1.2);
Create two platforms.
platfm1 = platform(sc); platfm2 = platform(sc);
Platform 1 follows a circular path of radius 10 m for one second. This is accomplished by placing waypoints in a circular shape, ensuring that the first and last waypoint are the same.
wpts1 = [0 10 0; 10 0 0; 0 -10 0; -10 0 0; 0 10 0]; time1 = [0; 0.25; .5; .75; 1.0]; platfm1.Trajectory = waypointTrajectory(wpts1, time1);
Platform 2 follows a straight path for one second.
wpts2 = [-8 -8 0; 10 10 0]; time2 = [0; 1.0]; platfm2.Trajectory = waypointTrajectory(wpts2,time2);
Verify the number of platforms in the scenario.
disp(sc.Platforms)
{1×1 fusion.scenario.Platform} {1×1 fusion.scenario.Platform}
Run the simulation and plot the current position of each platform. Use an animated line to plot the position of each platform.
figure grid axis equal axis([-12 12 -12 12]) line1 = animatedline('DisplayName','Trajectory 1','Color','b','Marker','.'); line2 = animatedline('DisplayName','Trajectory 2','Color','r','Marker','.'); title('Trajectories') p1 = pose(platfm1); p2 = pose(platfm2); addpoints(line1,p1.Position(1),p1.Position(2)); addpoints(line2,p2.Position(1),p2.Position(2)); while advance(sc) p1 = pose(platfm1); p2 = pose(platfm2); addpoints(line1,p1.Position(1),p1.Position(2)); addpoints(line2,p2.Position(1),p2.Position(2)); pause(0.1) end
![]()
Plot the waypoints for both platforms.
hold on plot(wpts1(:,1),wpts1(:,2),' ob') text(wpts1(:,1),wpts1(:,2),"t = " + string(time1),'HorizontalAlignment','left','VerticalAlignment','bottom') plot(wpts2(:,1),wpts2(:,2),' or') text(wpts2(:,1),wpts2(:,2),"t = " + string(time2),'HorizontalAlignment','left','VerticalAlignment','bottom') hold off
![]()
Create a tracking scenario with a specified update rate.
scene = trackingScenario('IsEarthCentered',true,'UpdateRate',0.01);
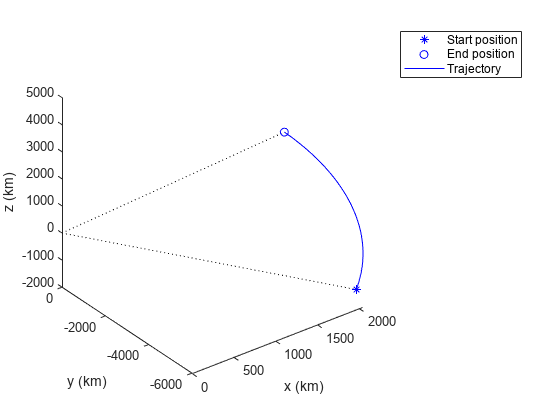
Add an airplane in the scenario. The trajectory of the airplane changes in latitude and altitude.
plane = platform(scene,'Trajectory',geoTrajectory([-12.338,-71.349,10600;42.390,-71.349,0],[0 36000]));Advance the tracking scenario and record the geodetic and Cartesian positions of the plane target.
positions = []; while advance(scene) poseLLA = pose(plane,'CoordinateSystem','Geodetic'); poseCart = pose(plane,'CoordinateSystem','Cartesian'); positions = [positions;poseCart.Position];%#ok<AGROW> Allow the buffer to grow. end
Visualize the trajectory in the ECEF frame.
figure() km = 1000; % Plot the trajectory. plot3(positions(1,1)/km,positions(1,2)/km,positions(1,3)/km, 'b*'); hold on; plot3(positions(end,1)/km,positions(end,2)/km,positions(end,3)/km, 'bo'); plot3(positions(:,1)/km,positions(:,2)/km,positions(:,3)/km,'b'); % Plot the Earth radial lines. plot3([0 positions(1,1)]/km,[0 positions(1,2)]/km,[0 positions(1,3)]/km,'k:'); plot3([0 positions(end,1)]/km,[0 positions(end,2)]/km,[0 positions(end,3)]/km,'k:'); xlabel('x (km)'); ylabel('y (km)'); zlabel('z (km)'); legend('Start position','End position','Trajectory')
Create a trackingScenario object and set its update rate to 0.
scene = trackingScenario(UpdateRate=0);
Add two platforms.
car = platform(scene); truck = platform(scene);
Define the trajectory for each platform using the waypointTrajectory object.
carTraj = waypointTrajectory([0 0 0; 10 10 -10],[0 100]); truckTraj = waypointTrajectory([-5 -5 -5; 20 20 -20],[0.1 100.1]); car.Trajectory = carTraj; truck.Trajectory = truckTraj;
Define two sensors and add each sensor to the corresponding platform.
carSensor = fusionRadarSensor(1,"Rotator",UpdateRate=1); truckSensor = fusionRadarSensor(2,"Rotator",UpdateRate=1); car.Sensors = {carSensor}; truck.Sensors = {truckSensor};
Run the scenario and detect platforms. Notice that the scenario determines the update rate based on the times of arrival of trajectories and the sensor update rates.
while scene.advance() if scene.SimulationTime < 5 disp("Time = " + scene.SimulationTime) end detections = detect(scene); if ~isempty(detections) disp("Time = " + scene.SimulationTime) disp(detections) end end
Time = 0 Time = 0.1 Time = 1 Time = 1.1 Time = 2 Time = 2.1 Time = 3 Time = 3.1 Time = 4 Time = 4.1