dsp.DCBlocker
입력 신호에서 DC 성분(오프셋) 차단
설명
dsp.DCBlocker System object™는 입력 신호의 각 채널(열)에서 DC 오프셋을 제거합니다. 이 동작은 DC 오프셋을 지속적으로 추정하고 제거하기 위해 시간의 흐름에 따라 실행됩니다.
입력 신호의 DC 성분을 차단하려면 다음을 수행하십시오.
dsp.DCBlocker객체를 만들고 속성을 설정합니다.함수를 호출하듯이 인수를 사용하여 객체를 호출합니다.
System object의 작동 방식에 대한 자세한 내용은 System object란? 항목을 참조하십시오.
이 객체는 특정 조건에서 C/C++ 코드 생성과 SIMD 코드 생성을 지원합니다. 자세한 내용은 코드 생성 항목을 참조하십시오.
생성
설명
dcblker = dsp.DCBlockerdcblker을 만들어 입력 신호의 각 채널(열)에서 DC 성분을 차단합니다.
dcblker = dsp.DCBlocker(PropertyName=Value)NormalizedBandwidth를 0.004로 설정하십시오.
속성
객체 함수
객체 함수를 사용하려면 System object를 첫 번째 입력 인수로 지정합니다. 예를 들어 이름이 obj인 System object의 시스템 리소스를 해제하려면 다음 구문을 사용하십시오.
release(obj)
예제
IIR, FIR, "Subtract mean" 추정 알고리즘을 사용하여 입력 신호의 DC 성분을 제거합니다.
15Hz 톤, 25Hz 톤, DC 오프셋으로 구성된 신호를 만듭니다.
t = (0:0.001:100)'; x = sin(30*pi*t) + 0.33*cos(50*pi*t) + 1;
세 가지 추정 알고리즘에 대해 세 개의 DC blocker 객체를 만듭니다.
dc1 = dsp.DCBlocker(Algorithm="IIR",Order=6); dc2 = dsp.DCBlocker(Algorithm="FIR",Length=100); dc3 = dsp.DCBlocker(Algorithm="Subtract mean");
1초마다 DC 블로커를 통해 입력 신호를 전달합니다. 1초씩의 증분으로 DC 블로커를 구현하여 수렴 시간의 차이를 관찰할 수 있습니다.
for idx = 1 : 100 range = (1:1000) + 1000*(idx-1); y1 = dc1(x(range)); % IIR estimate y2 = dc2(x(range)); % FIR estimate y3 = dc3(x(range)); % Subtract mean end
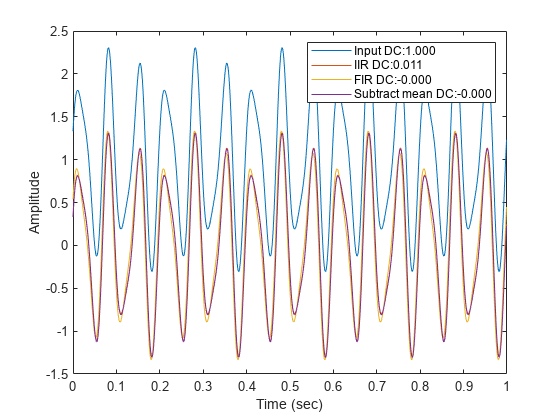
처음 1초 동안 세 가지 DC 블로커에 대한 입력 데이터와 출력 데이터를 플로팅하고 각 신호의 평균값을 표시합니다. 세 가지 알고리즘 유형의 평균값을 통해 FIR 알고리즘과 Subtract mean 알고리즘이 더 빨리 수렴된다는 것을 알 수 있습니다.
plot(t(1:1000),x(1:1000), ... t(1:1000),y1, ... t(1:1000),y2, ... t(1:1000),y3); xlabel("Time (sec)") ylabel("Amplitude") legend(sprintf("Input DC:%.3f",mean(x)), ... sprintf("IIR DC:%.3f",mean(y1)), ... sprintf("FIR DC:%.3f",mean(y2)), ... sprintf("Subtract mean DC:%.3f",mean(y3)));
DC 오프셋을 갖는 입력 신호의 스펙트럼을 동일한 신호에 DC 블로커를 적용한 후의 스펙트럼과 비교합니다. FIR 추정 알고리즘을 사용하기 위해 DC 블로커를 활성화합니다.
3개 톤으로 구성되고 DC 오프셋 1을 갖는 입력 신호를 만듭니다. 샘플링 주파수를 1kHz로 설정하고 신호 지속 시간을 100초로 설정합니다.
fs = 1000; t = (0:1/fs:100)'; x = sin(30*pi*t) + 0.67*sin(40*pi*t) + 0.33*sin(50*pi*t) + 1;
FIR 알고리즘을 사용하여 DC 오프셋을 추정하는 DC blocker 객체를 만듭니다.
dcblker = dsp.DCBlocker(Algorithm="FIR",Length=100);
전력 단위가 dBW로 설정되어 있고 주파수 범위가 [-30 30]인 스펙트럼 분석기를 만들어 입력 신호의 주파수 응답을 표시합니다. clone 함수를 사용하여 두 번째 스펙트럼 분석기를 만들어 출력 응답을 표시합니다. 그런 다음 스펙트럼 분석기의 Title 속성을 사용하여 레이블을 지정합니다.
hsa = spectrumAnalyzer(SampleRate=fs, ... Method="welch",... AveragingMethod="exponential",... SpectrumUnits="dBW",FrequencySpan="start-and-stop-frequencies",... StartFrequency=-30,StopFrequency=30,YLimits=[-200 20],... Title="Signal Spectrum"); hsb = clone(hsa); hsb.Title = "Signal Spectrum After DC Blocker";
DC 블로커를 통해 입력 신호 x를 전달하여 출력 신호 y를 생성합니다.
y = dcblker(x);
첫 번째 스펙트럼 분석기를 사용하여 입력 신호의 주파수 특성을 표시합니다. 15Hz, 20Hz, 25Hz의 톤과 DC 성분이 명확히 표시됩니다.
hsa(x)

두 번째 스펙트럼 분석기를 사용하여 출력 신호의 주파수 특성을 표시합니다. DC 성분이 제거되었습니다.
hsb(y)

알고리즘
참고 문헌
[1] Nezami, M. “Performance Assessment of Baseband Algorithms for Direct Conversion Tactical Software Defined Receivers: I/Q Imbalance Correction, Image Rejection, DC Removal, and Channelization.” MILCOM, 2002.