이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
시각적 인식
머신러닝 기법과 딥러닝 기법을 사용하여 객체를 검출할 수 있습니다. RANSAC(random sample consensus) 알고리즘을 사용하여 포물선 차선 경계나 3차 차선 경계를 분할, 검출, 모델링할 수도 있습니다. 객체를 검출한 후에는 Automated Driving Toolbox™ 함수를 사용하여 검출을 평가하고 시각화합니다.
함수
추천 예제

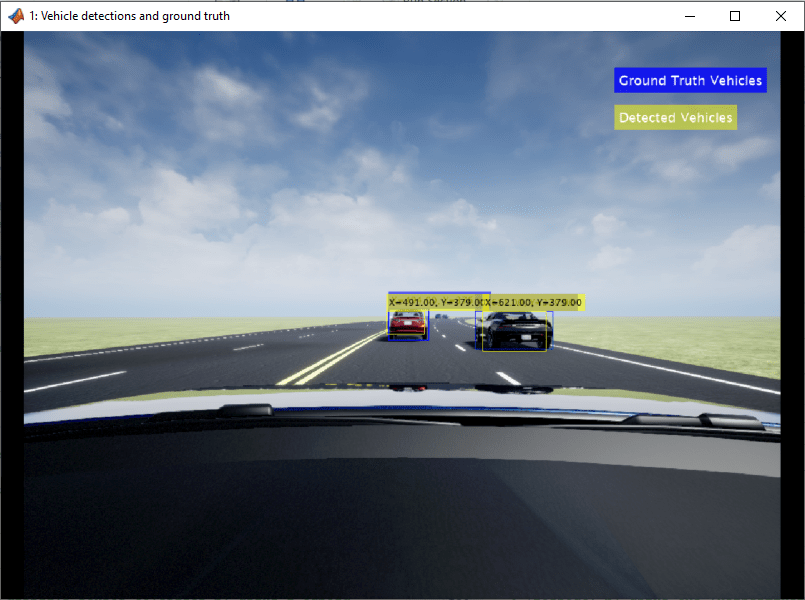
Visual Perception Using Monocular Camera
Construct a monocular camera sensor simulation capable of lane boundary and vehicle detections.

Generate Code for Lane Marker Detector
Generate C++ code for lane marker detector and validate the functional equivalence using software-in-the-loop (SIL) simulation.

Automate Testing for Lane Marker Detector
Automate the testing of a lane marker detector algorithm and generated code.

Train a Deep Learning Vehicle Detector
Train a vision-based vehicle detector using deep learning.
Generate Code for Vision Vehicle Detector
Generate deployable code for a monocular-camera-based vehicle detector and validate the functional equivalence with simulation.

Automate Testing for Vision Vehicle Detector
Automate the testing of a vehicle detector and generated code.

Track Multiple Vehicles Using a Camera
Detect and track multiple vehicles with a monocular camera mounted in a vehicle.

Perception-Based Parking Spot Detection Using Unreal Engine Simulation
Build a bird's-eye-view map of a parking lot using semantically segmented images from the ego vehicle camera, and detect empty parking spots from the map.

Perception Based Live Parking Spot Detection Using Unreal Engine Simulation
Develop a live parking spot detection system using deep learning and SLAM.