iopzmap
디폴트 옵션을 사용하여 동적 시스템의 입력-출력 쌍에 대한 극점-영점 맵 플로팅
설명
예제
입력이 하나이고 출력이 두 개인 동적 시스템을 만듭니다.
H = [tf(-5 ,[1 -1]); tf([1 -5 6],[1 1 0])];
극점-영점 맵을 플로팅합니다.
iopzmap(H)
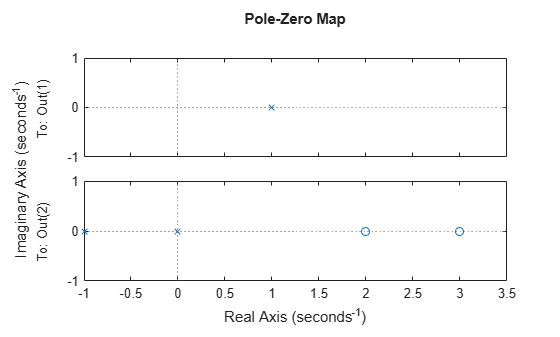
iopzmap은 시스템의 각 I/O 쌍에 대해 별도의 맵을 생성합니다.
입력-출력 데이터에서 추정된, 과모수화된 상태공간 모델의 극점과 영점을 표시합니다. (System Identification Toolbox™ 소프트웨어가 필요합니다).
load iddata1 sys = ssest(z1,6,ssestOptions('focus','simulation')); iopzmap(sys)
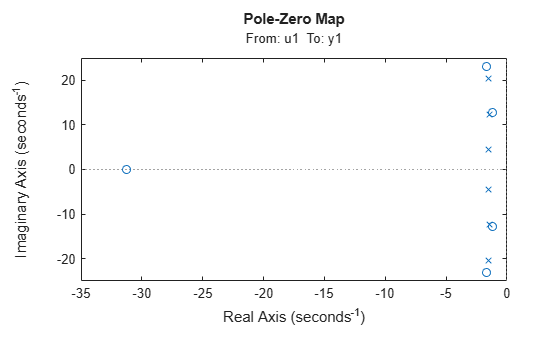
플롯은 거의 중첩되는 두 개의 극점-영점 쌍이 있음을 보여주며, 이는 이들의 잠재적 중복도를 암시합니다.
입력 인수
팁
극점-영점 플롯의 모양을 사용자 지정하는 추가 옵션이 필요한 경우
iopzplot을 사용합니다.iopzmap을 사용하여 생성된 플롯은 string형 배열이나 문자형 벡터로 구성된 셀형 배열을 사용해서 여러 줄로 된 제목이나 레이블을 지정하는 것을 지원하지 않습니다. 여러 줄로 된 제목과 레이블을 지정하려면newline문자가 포함된 단일 문자열을 사용하십시오.iopzmap(sys) title("first line" + newline + "second line");