로봇 제어 알고리즘의 배포 및 ROS와의 통합
해당 시리즈: 자율 로봇 시스템 개발을 위한 MATLAB 및 Simulink: 아이디어를 현실로
로봇 팔 제어에 필요한 소프트웨어의 설계를 완료하면, 실제 로봇 하드웨어와 통합하여야 합니다. 본 세션에서는 실제 로봇을 이용하여 물체를 집고 원하는 장소에 위치시키는 pick-and-place 어플리케이션 구현을 위해 MATLAB® 및 Simulink®와 로봇을 직접 연결하는 방법과 MATLAB 및 Simulink ROS 인터페이스를 이용하여 메시지를 이용하여 로봇을 제어하고 센서 정보를 입력 받는 방법에 대해서 알려드립니다.
- C/C++ 디바이스 드라이버 블록 개발을 통한 MATLAB 및 Simulink robot직접 연결 방법
- MATLAB 및 Simulink ROS 인터페이스를 통한 robot 연결 방법
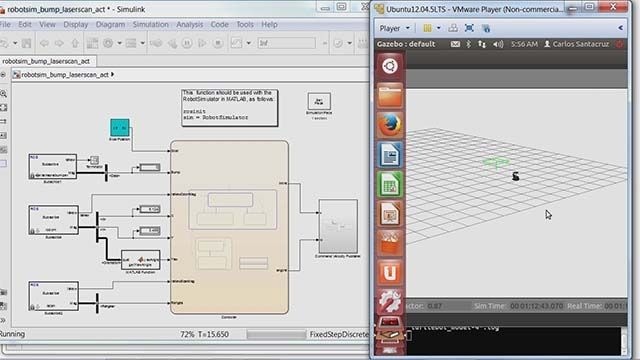
- Gazebo® 시뮬레이터와의 통합
발행: 2021년 3월 4일