MATLAB과 PX4를 활용한 드론 비행제어 소프트웨어 개발
청주대학교 문정호
드론의 비행제어 소프트웨어 개발을 위해서는 항법센서와 칼만필터, 입출력보드가 필수적으로 필요합니다. 하지만 이러한 환경을 구축하기 위해서는 많은 비용과 개발인력을 필요로 합니다. 이 세션에서는 이러한 문제를 해결하기 위해 오픈소스(PX4)와 UAV Toolbox를 활용하여 단기간에 드론 비행제어 소프트웨어를 개발하고 시험까지 완료한 내용을 다룹니다.
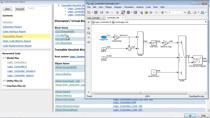
UAV Toolbox의 PX4 Support Package를 활용하여 드론의 센서 데이터를 Simulink®에서 읽고, 계산된 결과를 PWM으로 출력하여 드론을 제어하였습니다. 드론 제어기 및 관련 로직, 비행시뮬레이션 모델은 Simulink 와 Stateflow®를 활용해 구현하였습니다본 세션을 통해 드론 오픈소스(PX4)와 MATLAB® 을 연동하는 방법과 제약사항에 대해 이해할 수 있습니다.
이 프로젝트는 드론용 공개 하드웨어(Pixhawk®) 외에도 다양한 하드웨어에 탑재가능한 비행제어법칙 개발을 목표로 하고 있습니다. 그리고 개발된 제어법칙을 시뮬레이션단계부터 시험단계까지 완벽하게 검증하고자 하였습니다. UAV Toolbox와 Embedded Coder®를 이용해 Simulink환경에서 비행제어 소프트웨어를 손쉽게 개발하고, 비행시험까지 완료할 수 있었습니다.
발행: 2022년 6월 16일
추천 제품