visionhdl.EdgeDetector
Find edges of objects
Description
The visionhdl.EdgeDetector
System object™ finds the edges in a grayscale pixel stream using the Sobel, Prewitt, or
Roberts method. The object convolves the input pixels with derivative approximation
matrices to find the gradient of pixel magnitude along two orthogonal directions. It
then compares the sum of the squares of the gradients to a configurable threshold to
determine if the gradients represent an edge. The Sobel and Prewitt methods calculate
the gradient in horizontal and vertical directions. The Roberts method calculates the
gradients at 45 and 135 degrees.
The object returns a binary image as a stream of pixel values. A pixel value of 1 indicates that the pixel is an edge. You can optionally enable output of the gradient values in the two orthogonal directions at each pixel.
To find the edges of objects:
Create the
visionhdl.EdgeDetectorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
detectEdges = visionhdl.EdgeDetector
detectEdges = visionhdl.EdgeDetector(PropertyName=Value)
Properties
Usage
Syntax
Description
[
detects edges in the neighborhood of edge,ctrlout] = detectEdges(pixelin,ctrlin)pixelin by computing
the gradient in two orthogonal directions. The edge output
argument is a binary value indicating whether the sum of the squares of the
gradients for the input pixel is above the threshold indicating an edge.
[
detects edges in the neighborhood of G1,G2,ctrlout] = detectEdges(pixelin,ctrlin)pixelIn by computing
the gradient in two orthogonal directions. Use this syntax when you set the
GradientComponentOutputPorts property to
true. The G1 and
G2 output arguments are the gradients calculated in the
two orthogonal directions. When you set the Method property
to 'Sobel' or 'Prewitt', the first
argument is the vertical gradient, and the second argument is the horizontal
gradient. When you set the Method property to
'Roberts', the first argument is the 45-degree gradient,
and the second argument is the 135-degree gradient.
[
detects edges in the neighborhood of edge,ctrlout] = detectEdges(pixelin,ctrlin,thresh)pixelin by computing
the gradient in two orthogonal directions. Use this syntax when you set the
ThresholdSource property to
'InputPort'. The edge output
argument is a binary value indicating whether the sum of the squares of the
gradients is above the threshold, thresh, squared.
You can use any combination of the optional argument syntaxes.
This object uses a streaming pixel interface with a structure
for frame control signals. This interface enables the object to operate independently of image
size and format and to connect with other Vision HDL Toolbox™ objects. The object accepts and returns a scalar pixel value and control signals
as a structure containing five signals. The control signals indicate the validity of each pixel
and its location in the frame. To convert a pixel matrix into a pixel stream and control
signals, use the visionhdl.FrameToPixels object. For a
description of the interface, see Streaming Pixel Interface.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Detect edges in a thumbnail image by using the Sobel method.
Import a test image.
frmInput = imread('rice.png'); [frmActivePixels,frmActiveLines] = size(frmInput); figure imshow(frmInput) title 'Input Image'

Create a serializer and specify the size of inactive pixel regions.
frm2pix = visionhdl.FrameToPixels( ... 'NumComponents',1, ... 'VideoFormat','custom', ... 'ActivePixelsPerLine',frmActivePixels, ... 'ActiveVideoLines',frmActiveLines, ... 'TotalPixelsPerLine',frmActivePixels+10, ... 'TotalVideoLines',frmActiveLines+10, ... 'StartingActiveLine',6, ... 'FrontPorch',5);
Create an edge detection object with the default property values. The default detection method is Sobel.
edgeDetectSobel = visionhdl.EdgeDetector();
Speed up simulation by enabling a simulation mode that uses code generation for the System object.
edgeDetectSobel.simulateUsing('Code generation');Serialize the test image by using the object you created. pixIn is a vector of intensity values. ctrlIn is a vector of control signal structures. Preallocate vectors for the output signals.
[pixIn,ctrlIn] = frm2pix(frmInput); [~,~,numPixelsPerFrame] = getparamfromfrm2pix(frm2pix); ctrlOut = repmat(pixelcontrolstruct,numPixelsPerFrame,1); edgeOut = false(numPixelsPerFrame,1);
For each pixel in the stream, compute whether it represents an edge.
for p = 1:numPixelsPerFrame [edgeOut(p),ctrlOut(p)] = edgeDetectSobel(pixIn(p),ctrlIn(p)); end
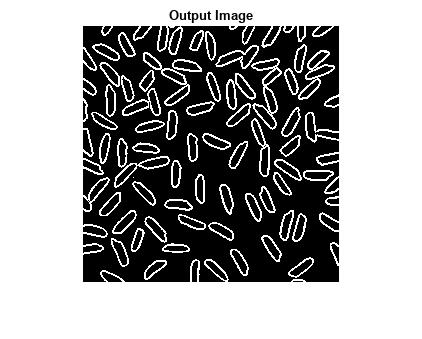
Create a deserializer with a format matching that of the serializer. Use the deserializer to convert the output pixel stream to an image frame.
pix2frm = visionhdl.PixelsToFrame( ... 'NumComponents',1, ... 'VideoFormat','custom', ... 'ActivePixelsPerLine',frmActivePixels, ... 'ActiveVideoLines',frmActiveLines, ... 'TotalPixelsPerLine',frmActivePixels+10); [frmOutput,frmValid] = pix2frm(edgeOut,ctrlOut); if frmValid figure imshow(frmOutput) title 'Output Image' end
Algorithms
This object implements the algorithms described on the Edge Detector block reference page.
Extended Capabilities
Version History
Introduced in R2015aSee Also
Edge Detector | edge (Image Processing Toolbox) | visionhdl.FrameToPixels