YOLO v4 딥러닝을 사용한 객체 검출
이 예제에서는 YOLO v4(You Only Look Once Version 4) 딥러닝 신경망을 사용하여 영상에서 객체를 검출하는 방법을 보여줍니다. 이 예제에서는 다음을 수행합니다
YOLO v4 객체 검출 신경망의 훈련, 검증, 테스트를 위한 데이터셋을 구성합니다. 또한 신경망 효율성을 향상하기 위해 훈련 데이터셋에 대한 데이터 증강을 수행합니다.
YOLO v4 객체 검출 신경망을 훈련시키는 데 사용할 앵커 상자를 훈련 데이터로부터 계산합니다.
yolov4ObjectDetector함수를 사용하여 YOLO v4 객체 검출기를 만들고trainYOLOv4ObjectDetector함수를 사용하여 검출기를 훈련시킵니다.
이 예제에서는 또한 영상에서 차량을 검출하는 데 사용할 사전 훈련된 YOLO v4 객체 검출기를 제공합니다. 사전 훈련된 신경망은 백본 신경망으로 tiny-yolov4-coco를 사용하고 차량 데이터셋에 대해 훈련됩니다. YOLO v4 객체 검출 신경망에 대한 자세한 내용은 YOLO v4 시작하기 항목을 참조하십시오.
데이터셋 불러오기
이 예제에서는 295개의 영상을 포함하는 소규모의 차량 데이터셋을 사용합니다. 이러한 영상의 많은 부분은 Caltech Computational Vision 웹사이트에서 사용 가능한 Caltech Cars 1999 및 2001 데이터셋에서 가져온 것으로, Pietro Perona가 만들었으며 허락 하에 사용되었습니다. 각 영상에는 차량에 대해 레이블 지정된 건수가 한 건 또는 두 건 있습니다. 작은 데이터셋은 YOLO v4 훈련 절차를 살펴보기에 유용하지만, 실전에서 강건한 검출기를 훈련시키려면 레이블이 지정된 영상이 더 많이 필요합니다.
차량 영상의 압축을 풀고 차량 ground truth 데이터를 불러옵니다.
unzip vehicleDatasetImages.zip data = load("vehicleDatasetGroundTruth.mat"); vehicleDataset = data.vehicleDataset;
차량 데이터는 2열 테이블에 저장되어 있습니다. 첫 번째 열은 영상 파일 경로를 포함하고, 두 번째 열은 경계 상자를 포함합니다.
데이터 세트의 처음 몇 개 행을 표시합니다.
vehicleDataset(1:4,:)
ans=4×2 table
'vehicleImages/image_00001.jpg' [220,136,35,28]
'vehicleImages/image_00002.jpg' [175,126,61,45]
'vehicleImages/image_00003.jpg' [108,120,45,33]
'vehicleImages/image_00004.jpg' [124,112,38,36]
차량 데이터 로컬 폴더에 대한 전체 경로를 추가합니다.
vehicleDataset.imageFilename = fullfile(pwd,vehicleDataset.imageFilename);
데이터셋을 훈련 세트, 검증 세트, 테스트 세트로 분할합니다. 데이터의 60%를 훈련용으로, 데이터의 10%를 검증용으로, 나머지를 훈련된 검출기의 테스트용으로 선택합니다.
rng("default");
shuffledIndices = randperm(height(vehicleDataset));
idx = floor(0.6 * length(shuffledIndices) );
trainingIdx = 1:idx;
trainingDataTbl = vehicleDataset(shuffledIndices(trainingIdx),:);
validationIdx = idx+1 : idx + 1 + floor(0.1 * length(shuffledIndices) );
validationDataTbl = vehicleDataset(shuffledIndices(validationIdx),:);
testIdx = validationIdx(end)+1 : length(shuffledIndices);
testDataTbl = vehicleDataset(shuffledIndices(testIdx),:);imageDatastore와 boxLabelDatastore를 사용하여 훈련과 평가 과정에서 영상 및 레이블 데이터를 불러오기 위한 데이터저장소를 만듭니다.
imdsTrain = imageDatastore(trainingDataTbl{:,"imageFilename"});
bldsTrain = boxLabelDatastore(trainingDataTbl(:,"vehicle"));
imdsValidation = imageDatastore(validationDataTbl{:,"imageFilename"});
bldsValidation = boxLabelDatastore(validationDataTbl(:,"vehicle"));
imdsTest = imageDatastore(testDataTbl{:,"imageFilename"});
bldsTest = boxLabelDatastore(testDataTbl(:,"vehicle"));영상 데이터저장소와 상자 레이블 데이터저장소를 결합합니다.
trainingData = combine(imdsTrain,bldsTrain); validationData = combine(imdsValidation,bldsValidation); testData = combine(imdsTest,bldsTest);
데이터 세트에 아래에 해당하는 경우가 하나라도 있으면 validateInputData를 사용하여 유효하지 않은 영상, 경계 상자 또는 레이블을 검출합니다.
샘플이 유효하지 않은 영상 형식이거나 NaN 값을 포함하고 있음
경계 상자가 0, NaN 값, Inf 값을 포함하고 있거나 비어 있음
레이블이 누락되었거나 범주형이 아님
경계 상자의 값은 유한한 양의 정수여야 하며 NaN이 아니어야 합니다. 경계 상자 값의 높이와 너비는 양수여야 하며 영상 경계 내에 있어야 합니다.
validateInputData(trainingData); validateInputData(validationData); validateInputData(testData);
상자 레이블과 함께 훈련 영상 중 하나를 표시합니다.
data = read(trainingData);
I = data{1};
bbox = data{2};
annotatedImage = insertShape(I,"Rectangle",bbox);
annotatedImage = imresize(annotatedImage,2);
figure
imshow(annotatedImage)
reset(trainingData);
YOLO v4 객체 검출기 신경망 만들기
훈련에 사용할 신경망 입력 크기를 지정합니다.
inputSize = [416 416 3];
검출할 객체 클래스의 이름을 지정합니다.
className = "vehicle";estimateAnchorBoxes 함수를 사용하여 훈련 데이터의 사물 크기를 기반으로 앵커 상자를 추정합니다. 훈련 전 이루어지는 영상 크기 조정을 고려하기 위해 앵커 상자 추정에 사용하는 훈련 데이터를 크기 조정하십시오. transform 함수를 사용하여 훈련 데이터를 전처리한 후에 앵커 상자의 개수를 정의하고 앵커 상자를 추정합니다. preprocessData 헬퍼 함수를 사용하여 훈련 데이터의 크기를 신경망의 입력 크기로 조정합니다.
rng("default")
trainingDataForEstimation = transform(trainingData,@(data)preprocessData(data,inputSize));
numAnchors = 6;
[anchors,meanIoU] = estimateAnchorBoxes(trainingDataForEstimation,numAnchors);anchorBoxes 인수를 모든 검출 헤드에 사용할 앵커 상자로 지정합니다. 앵커 상자는 [M x 1]의 셀형 배열로 지정됩니다. 여기서 M은 검출 헤드의 개수를 나타냅니다. 각 검출 헤드는 anchors 인수에 저장된 [N x 2] 행렬로 구성됩니다. 여기서 N은 사용할 앵커 개수입니다. 특징 맵 크기를 기준으로 각 검출 헤드에 대해 anchorBoxes를 지정합니다. 낮은 스케일에서는 더 큰 앵커를 사용하고 높은 스케일에서는 더 작은 앵커를 사용합니다. 그렇게 하려면 앵커를 면적을 기준으로 내림차순으로 정렬하고 처음 3개 항목을 첫 번째 검출 헤드에 할당하고 마지막 3개 항목을 두 번째 검출 헤드에 할당합니다.
area = anchors(:, 1).*anchors(:,2);
[~,idx] = sort(area,"descend");
anchors = anchors(idx,:);
anchorBoxes = {anchors(1:3,:)
anchors(4:6,:)};앵커 상자 선택에 관한 자세한 내용은 Estimate Anchor Boxes from Training Data(Computer Vision Toolbox™) 및 객체 검출용 앵커 상자 항목을 참조하십시오.
yolov4ObjectDetector 함수를 사용하여 YOLO v4 객체 검출기를 만듭니다. COCO 데이터셋에서 훈련된 사전 훈련된 YOLO v4 검출 신경망의 이름을 지정합니다. 클래스 이름과 추정된 앵커 상자를 지정합니다.
detector = yolov4ObjectDetector("tiny-yolov4-coco",className,anchorBoxes,InputSize=inputSize);데이터 증강 수행하기
훈련 정확도를 향상하기 위해 데이터 증강을 수행합니다. transform 함수를 사용하여 훈련 데이터에 사용자 지정 데이터 증강을 적용합니다. augmentData 헬퍼 함수는 입력 데이터에 다음과 같은 증강을 적용합니다.
HSV 공간에서 색 지터 증강
무작위 좌우 반전
10% 무작위 스케일링
테스트 데이터와 검증 데이터에는 데이터 증강이 적용되지 않는다는 것에 유의하십시오. 이상적인 경우라면 테스트 데이터와 검증 데이터가 원본 데이터를 대표해야 하므로 편향되지 않은 평가를 위해 수정되지 않은 상태로 남겨 두는 것이 좋습니다.
augmentedTrainingData = transform(trainingData,@augmentData);
증강한 훈련 데이터의 샘플을 읽어 들이고 표시합니다.
augmentedData = cell(4,1); for k = 1:4 data = read(augmentedTrainingData); augmentedData{k} = insertShape(data{1},"rectangle",data{2}); reset(augmentedTrainingData); end figure montage(augmentedData,BorderSize=10)

훈련 옵션 지정하기
trainingOptions를 사용하여 신경망 훈련 옵션을 지정합니다. Adam 솔버를 사용하여 상수 학습률 0.001로 Epoch 80회만큼 객체 검출기를 훈련시킵니다. 최소의 검증 손실을 달성하도록 훈련된 검출기를 얻으려면 OutputNetwork를 "best-validation-loss"로 설정합니다. ValidationData를 검증 데이터로 설정하고 ValidationFrequency를 1000으로 설정합니다. 데이터를 더 자주 검증하기 위해 ValidationFrequency를 줄일 수 있으며, 그러면 훈련 시간이 늘어납니다. ExecutionEnvironment를 사용하여 신경망 훈련에 사용할 하드웨어 리소스를 결정합니다. ExecutionEnvironment에 대한 디폴트 값은 "auto"입니다. 이 경우, GPU를 사용할 수 있으면 GPU가 선택되고 그렇지 않으면 CPU가 선택됩니다. 훈련 과정 도중에 부분적으로 훈련된 검출기를 저장하려면 CheckpointPath를 임시 위치로 설정합니다. 정전이나 시스템 장애 등으로 인해 훈련이 중단된 경우, 저장된 검사 지점에서 훈련을 재개할 수 있습니다.
options = trainingOptions("adam", ... GradientDecayFactor=0.9, ... SquaredGradientDecayFactor=0.999, ... InitialLearnRate=0.001, ... LearnRateSchedule="none", ... MiniBatchSize=4, ... L2Regularization=0.0005, ... MaxEpochs=80, ... DispatchInBackground=true, ... ResetInputNormalization=true, ... Shuffle="every-epoch", ... VerboseFrequency=20, ... ValidationFrequency=1000, ... CheckpointPath=tempdir, ... ValidationData=validationData, ... OutputNetwork="best-validation-loss");
YOLO v4 객체 검출기 훈련하기
trainYOLOv4ObjectDetector 함수를 사용하여 YOLO v4 객체 검출기를 훈련시킵니다. 이 예제는 24GB의 메모리가 탑재된 NVIDIA™ RTX A5000에서 실행되었습니다. 이 설정을 사용하여 이 신경망을 훈련시키는 데 약 33분이 걸렸습니다. 훈련 시간은 사용하는 하드웨어에 따라 달라집니다. 신경망을 훈련시키는 대신 Computer Vision Toolbox™에서 사전 훈련된 YOLO v4 객체 검출기를 사용해도 됩니다.
downloadPretrainedYOLOv4Detector 헬퍼 함수를 사용하여 사전 훈련된 검출기를 다운로드합니다. 증강된 훈련 데이터에 대해 검출기를 훈련시키려면 doTraining 값을 true로 설정합니다.
doTraining = false; if doTraining % Train the YOLO v4 detector. [detector,info] = trainYOLOv4ObjectDetector(augmentedTrainingData,detector,options); else % Load pretrained detector for the example. detector = downloadPretrainedYOLOv4Detector(); end
테스트 영상에 대해 검출기를 실행합니다.
I = imread("highway.png");
[bboxes,scores,labels] = detect(detector,I);결과를 표시합니다.
I = insertObjectAnnotation(I,"rectangle",bboxes,scores);
figure
imshow(I)
테스트 세트를 사용하여 검출기 평가하기
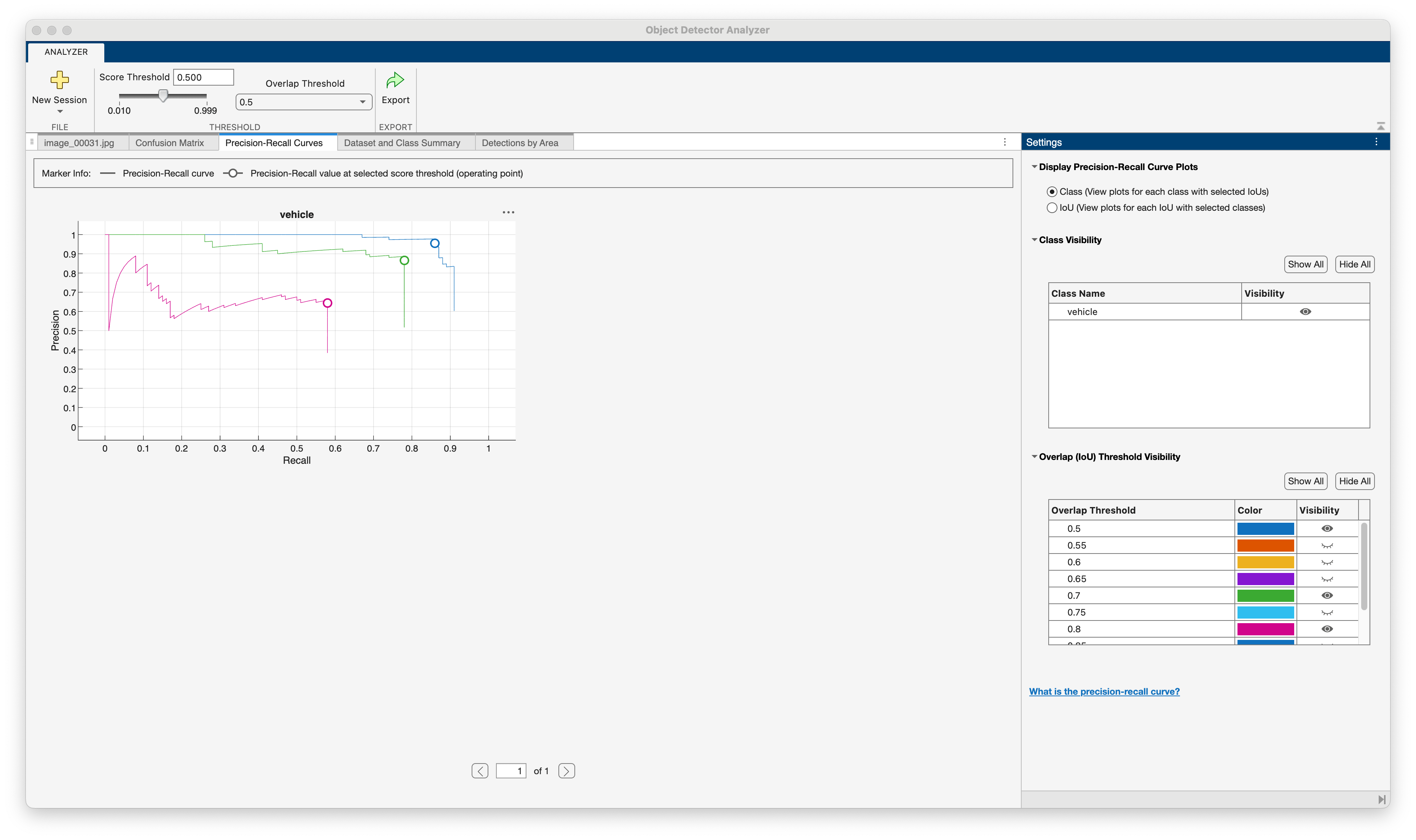
객체 검출기 분석기 앱을 사용하여 ground truth를 기준으로 검출기의 성능을 시각화하고 평가합니다. 이 앱은 테스트 세트에 대해 검출기를 실행하여 평균 정밀도와 같은 메트릭을 계산하고, 정밀도-재현율 곡선을 플로팅하고, 테스트 세트의 각 영상에 대한 검출 결과를 표시합니다. ground truth 데이터를 검출기의 올바른 예측 및 잘못된 예측과 나란히 시각화할 수 있으며, 검출기에서 가장 많은 오류가 발생한 영상으로 빠르게 이동하여 성능을 더 잘 이해할 수 있습니다. 예를 들어 검출기가 특정 시나리오에서 실패하는 경우, 이는 해당 특정 시나리오를 포함하는 추가 데이터로 검출기를 다시 훈련시켜야 함을 나타낼 수 있습니다.
objectDetectorAnalyzer(detector,testData)

정밀도-재현율 곡선 탭을 선택하면 차량 클래스에 대한 정밀도-재현율 곡선을 확인할 수 있습니다. 이러한 곡선은 평가를 위한 중첩 임계값이 0.5일 때 검출기가 테스트 세트에서 우수한 성능을 보이지만, 중첩 임계값이 0.7과 0.8로 증가함에 따라 성능이 저하됨을 보여줍니다. 곡선 위의 원형 마커는 검출기의 동작점을 나타냅니다. 정밀도-재현율 곡선 위의 동작점은 검출기가 달성한 정밀도와 재현율 간의 균형을 결정하는 특정 검출 점수 임계값 설정입니다. 점수 임계값 슬라이더를 조정하여 응용 사례에 적합한 최적의 동작점을 결정할 수 있습니다.
다음과 같은 다른 탭에서는 추가적인 검출 메트릭을 확인할 수 있습니다.
데이터셋 및 클래스 요약: 모든 클래스에 걸쳐 데이터 세트의 성능을 요약합니다.
혼동행렬: 각 클래스별로 검출된 객체 수와 검출에서 누락된 객체 수를 표시합니다.
면적 기준 검출: 객체 크기를 기준으로 올바른 검출과 잘못된 검출을 시각화하여 객체 크기로 인한 오류를 포착합니다.
평가 메트릭의 사용자 지정 시각화에 대해서는 evaluateObjectDetection을 참조하십시오. 객체 검출 메트릭에 대한 자세한 내용은 <TODO Sasha enter link to topic page>를 참조하십시오.
지원 함수
데이터 증강을 수행하기 위한 헬퍼 함수.
function data = augmentData(A) % Apply random horizontal flipping, and random X/Y scaling. Boxes that get % scaled outside the bounds are clipped if the overlap is above 0.25. Also, % jitter image color. data = cell(size(A)); for ii = 1:size(A,1) I = A{ii,1}; bboxes = A{ii,2}; labels = A{ii,3}; sz = size(I); if numel(sz) == 3 && sz(3) == 3 I = jitterColorHSV(I,... contrast=0.0,... Hue=0.1,... Saturation=0.2,... Brightness=0.2); end % Randomly flip image. tform = randomAffine2d(XReflection=true,Scale=[1 1.1]); rout = affineOutputView(sz,tform,BoundsStyle="centerOutput"); I = imwarp(I,tform,OutputView=rout); % Apply same transform to boxes. [bboxes,indices] = bboxwarp(bboxes,tform,rout,OverlapThreshold=0.25); labels = labels(indices); % Return original data only when all boxes are removed by warping. if isempty(indices) data(ii,:) = A(ii,:); else data(ii,:) = {I,bboxes,labels}; end end end function data = preprocessData(data,targetSize) % Resize the images and scale the pixels to between 0 and 1. Also scale the % corresponding bounding boxes. for ii = 1:size(data,1) I = data{ii,1}; imgSize = size(I); bboxes = data{ii,2}; I = im2single(imresize(I,targetSize(1:2))); scale = targetSize(1:2)./imgSize(1:2); bboxes = bboxresize(bboxes,scale); data(ii,1:2) = {I,bboxes}; end end
사전 훈련된 YOLO v4 객체 검출기를 다운로드하기 위한 헬퍼 함수.
function detector = downloadPretrainedYOLOv4Detector() % Download a pretrained yolov4 detector. if ~exist("yolov4TinyVehicleExample_24a.mat", "file") if ~exist("yolov4TinyVehicleExample_24a.zip", "file") disp("Downloading pretrained detector..."); pretrainedURL = "https://ssd.mathworks.com/supportfiles/vision/data/yolov4TinyVehicleExample_24a.zip"; websave("yolov4TinyVehicleExample_24a.zip", pretrainedURL); end unzip("yolov4TinyVehicleExample_24a.zip"); end pretrained = load("yolov4TinyVehicleExample_24a.mat"); detector = pretrained.detector; end
참고 문헌
[1] Alexey Bochkovskiy, Chien-Yao Wang, and Hong-Yuan Mark Liao. “YOLOv4: Optimal Speed and Accuracy of Object Detection.” 2020, arXiv:2004.10934. https://arxiv.org/abs/2004.10934.
참고 항목
앱
함수
yolov4ObjectDetector|trainYOLOv4ObjectDetector|yoloxObjectDetector|detect|evaluateObjectDetection|trainingOptions(Deep Learning Toolbox) |transform
도움말 항목
- Object Detection in Large Satellite Imagery Using Deep Learning
- Detect Small Objects Using Tiled Training of YOLOX Network
- Detect Defects on Printed Circuit Boards Using YOLOX Network
- Multiclass Object Detection Using YOLO v2 Deep Learning
- YOLO v4 시작하기
- Choose an Object Detector
- 딥러닝을 사용한 객체 검출 시작하기
- 객체 검출용 앵커 상자
- MATLAB의 딥러닝 (Deep Learning Toolbox)
- 사전 훈련된 심층 신경망 (Deep Learning Toolbox)