이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
시각 기반의 SLAM 및 움직임 기반 구조
스테레오 비전은 동일한 장면에 대한 둘 이상의 뷰를 비교하여 카메라 영상으로부터 깊이 정보를 복원하는 과정입니다. 움직임 기반 구조(SfM)는 2차원 영상 세트로부터 장면의 3차원 구조를 추정하는 과정입니다. 시각 기반의 동시적 위치추정 및 지도작성(vSLAM)은 주변 환경에 대하여 지도를 작성하면서 동시에 이 환경을 기준으로 카메라의 위치와 방향을 계산하는 과정입니다. 시각-관성 SLAM(viSLAM)은 카메라에서 얻은 시각적 입력을 IMU의 위치 데이터와 융합하여 SLAM 결과를 개선하는 과정입니다. 자세한 내용은 Implement Visual SLAM in MATLAB 및 움직임 기반 구조란? 항목을 참조하십시오.
카테고리
추천 예제

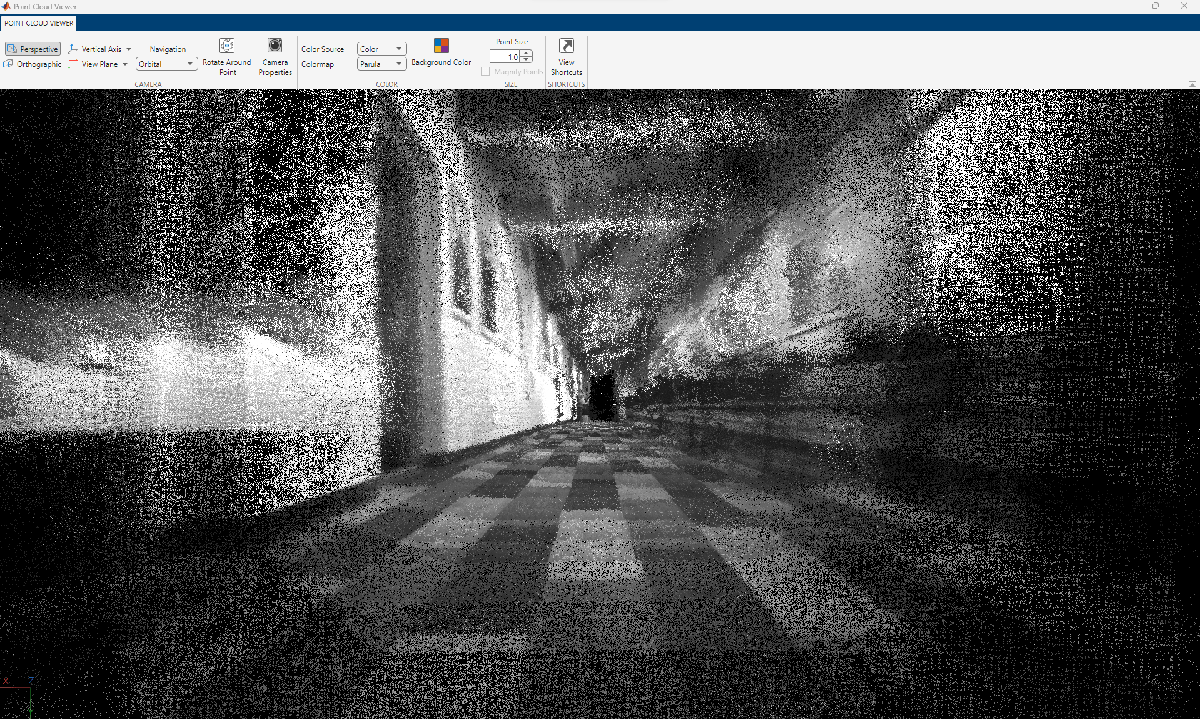
Performant and Deployable Monocular Visual SLAM
Use visual inputs from a camera to perform vSLAM and generate multi-threaded C/C++ code.
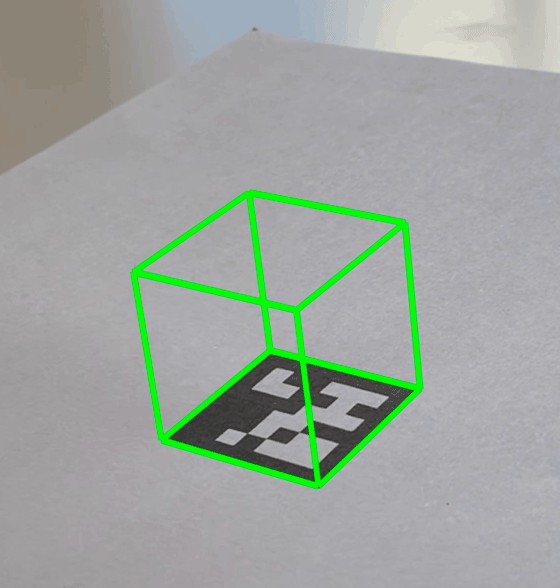
Augmented Reality Using AprilTag Markers
Use marker-based augmented reality to render virtual content into a scene.
Performant and Deployable Stereo Visual SLAM with Fisheye Images
Use fisheye image data from a stereo camera to perform VSLAM and generate multi-threaded C/C++ code.
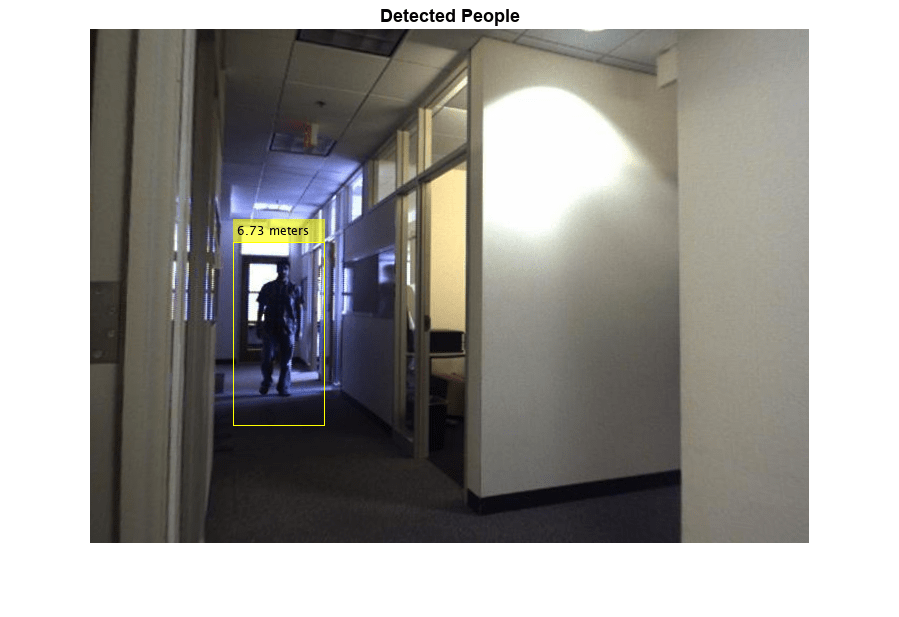
스테레오 비디오에서 깊이 추정
보정된 스테레오 카메라로 촬영한 비디오에서 사람을 검출하고 카메라와의 거리를 확인합니다.

Develop Visual SLAM Algorithm Using Unreal Engine Simulation
Develop a visual simultaneous localization and mapping (SLAM) algorithm using image data obtained from the Unreal Engine® simulation environment.
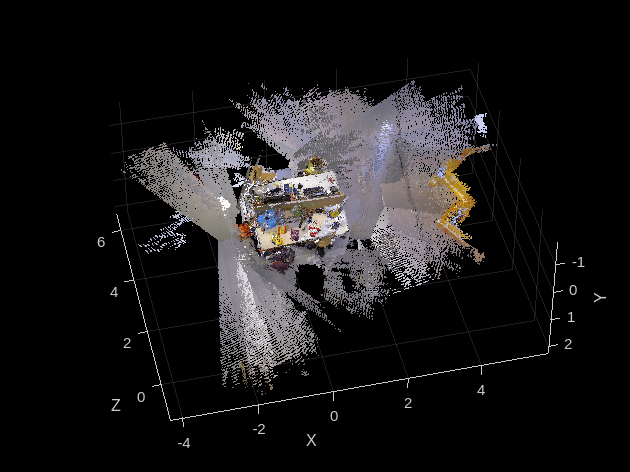
Visual SLAM with RGB-D Camera
Process RGB-D image data to build a map of an indoor environment and estimate the trajectory of the camera.

Monocular Visual-Inertial Odometry (VIO) Using Factor Graph
Perform monocular visual-inertial odometry using tightly coupled factor graph optimization.