cuboid2img
Syntax
Description
projectedCuboid = cuboid2img(cuboid,projectionMatrix)
[
returns a logical array that indicates which input cuboid projections are within the field
of view of the camera, using the input arguments from the first syntax.projectedCuboid,validIndex] = cuboid2img(___)
[
returns the face vertices of each projected cuboid to facilitate visualization of specific
projected cuboid faces. You can use the projectedCuboid,validIndex,allFaceVertices] = cuboid2img(___)showShape or
insertShape function to visualize the
projected cuboid faces.
[___] = cuboid2img(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example,
Name=Value)cuboid2img(data.cuboid,projectionMatrix,OutputFormat="rectangles")
specifies to output each cuboid as two projected cuboid faces forming axis-aligned
rectangles.
Examples
Load an image into the workspace and resize it.
imOrig = imread(fullfile(matlabroot,"toolbox","vision","visiondata", ... "stopSignImages","image004.jpg")); I = imresize(imOrig,[1080 1920]);
Load a MAT file that contains 3-D cuboid labels and the camera projection matrix of the sensor that captured the images.
data = load("cuboidData.mat");
projectionMatrix = data.projectionMatrix;
cuboid = data.cuboid;Convert the 3-D cuboids into 2-D projected cuboids.
vertices = cuboid2img(cuboid,projectionMatrix);
Insert the projected cuboids into the image, and then display the result.
Iout = insertShape(I,"projected-cuboid",vertices);
imshow(Iout)
Load an image into the MATLAB® workspace, and then resize it.
imOrig = imread(fullfile(matlabroot,"toolbox","vision","visiondata", ... "stopSignImages","image004.jpg"')); I = imresize(imOrig,[1080 1920]);
Load MAT file previously created 3-D cuboid labels and the camera projection matrix of the sensor used to capture the images.
data = load("cuboidData.mat");
projectionMatrix = data.projectionMatrix;
cuboid = data.cuboid;Convert 3-D cuboids into 2-D projected cuboids, and obtain the face vertices of the projected cuboids.
[projectedCuboids,validIdx,allFaceVertices] = cuboid2img(cuboid,projectionMatrix);
Insert the projected cuboids into the image.
I = insertShape(I,"projected-cuboid",projectedCuboids); Select the third face of each projected cuboid.
whichFace = 3; selectedFaceVertices = allFaceVertices(:,:,whichFace);
Highlight the selected faces using a filled polygon and display the result.
J = insertShape(I,"filled-polygon",selectedFaceVertices);
imshow(J)
Input Arguments
Name-Value Arguments
Output Arguments
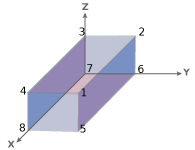
Projected cuboids, returned as an 8-by-2-by-P array or a
P-by-8 matrix. P is the number of projected
cuboids. P is less than or equal to the number of input 3-D cuboids
M. Any cuboids specified in the input cuboid
that are outside the camera field of view are not included in the output. Each page,
P of the output contains the [x
y] locations for the eight vertices of a projected cuboid. The order
of the vertices is [1 2 3 4 5 6 7 8], where [1 4 8
5] and [2 3 7 6] define the front-facing and rear-facing
rectangles, respectively, counterclockwise from the upper-right vertex.
Index of projected cuboids, returned as an
M-by-1 logical vector, where M
is the number of input 3-D cuboids. A logical 1 value indicates a
valid, corresponding projected cuboid in front of the camera, containing at least one
vertex with positive coordinates. A logical 0 value indicates that
the corresponding projected cuboid is invalid.
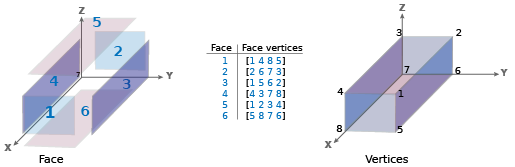
Face vertices, returned as a P-by-8-by-6
array, where P is the number of returned projected cuboids. Each page
of the array contains the four vertices for the six faces of each of the returned
projected cuboids. You can use this output to visualize specific faces of the cuboids.
For example, to return the vertices of the fifth face of the third projected cuboid,
specify:
allFaceVertices(3,:,5)
You can use the allFaceVertices output with the showShape
or insertShape function to visualize the
faces of the projected cuboids. For an example, see Highlight One Face of -D Cuboid.
Version History
Introduced in R2022b