아날로그-디지털 컨버터와 디지털-아날로그 컨버터
예제를 통해 마이크로컨트롤러와 물리 시스템 간의 인터페이스를 설계하고 아날로그 신호와 디지털 신호를 변환하는 방법을 알아봅니다.
추천 예제
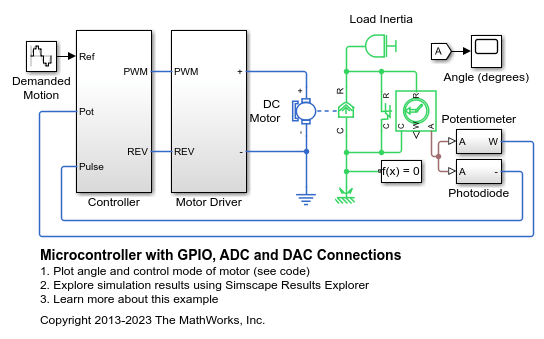
GPIO, ADC 및 DAC 연결이 있는 마이크로컨트롤러
이 예제에서는 마이크로컨트롤러 유닛(MCU)과 물리 시스템 간의 인터페이스를 모델링하는 방법을 보여줍니다. 여기서 마이크로컨트롤러의 GPIO 연결, ADC 연결, DAC 연결은 각도 이동이 제한된 DC 모터 및 연결된 부하를 제어하는 데 사용됩니다. 부하 각도 측정은 전위차계 센서를 통해 수행됩니다. 이 측정값은 발광다이오드가 LED의 각도 0 광 펄스를 감지할 때까지 회전자 위치를 초기에 점진적으로 상승시켜 보정됩니다. 보정되면 MCU는 0.1Hz 45도 진폭 정현파를 명령합니다.

잡음이 있는 델타 시그마 ADC
이 예제에서는 시그마 델타 아날로그-디지털 컨버터의 간단한 구현을 보여줍니다. 0~Vref(=1V) 범위의 입력은 적분기가 재설정될 때까지 적분됩니다. 재설정에 걸리는 시간은 입력 값에 비례합니다. 펄스의 복조는 저역통과 필터에 의해 수행됩니다. Asynchronous Sample & Hold 블록은 에지 트리거 D 유형 플립플롭과 유사하게 동작하여 클록의 상승 에지에서만 입력 U를 출력 Y로 전달합니다. 이 모델을 사용하여 등가 입력 잡음과 같은 op-amp 손상이 컨버터 정확도에 미치는 영향을 살펴보고 이해할 수 있습니다. 잡음을 끄려면 블록 Vn을 열고 잡음 모드로 '비활성화됨'을 선택합니다.

스위칭 커패시터 아날로그-디지털 컨버터
이 예제에서는 아날로그 입력 신호를 디지털 출력 신호로 변환하기 위해 시그마-델타 아날로그-디지털 컨버터(ADC: Analog to Digital Converter)에서 시그마-델타 변조를 사용하는 방법을 보여줍니다. 시그마-델타 ADC에 대한 아날로그 입력은 전압과 지속 시간이 고정된 펄스를 생성하는 발진기를 제어하며, 이때 펄스 사이의 시간 간격은 아날로그 입력에 반비례합니다. 발진기 펄스는 아날로그 입력 신호의 디지털 표현을 제공하기 위해 일정한 시간 간격으로 적분됩니다.
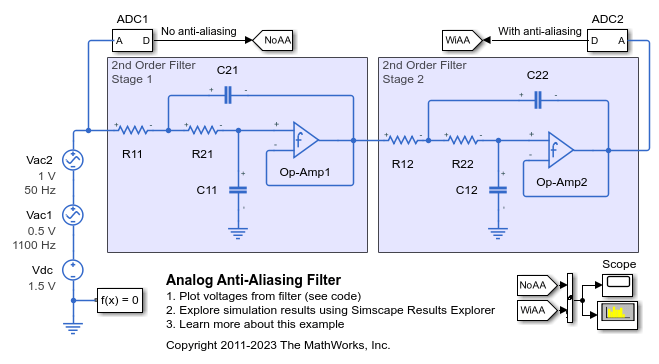
아날로그 안티에일리어싱 필터
이 예제에서는 A/D 변환 컨버터에 사용할 안티에일리어싱 필터의 아날로그 구현을 보여줍니다. 필터 차단 주파수는 1kHz의 A/D 변환 컨버터 샘플링 주파수와 일치시키기 위해 500Hz로 설정됩니다. 테스트 신호에는 원하는 50Hz 정현파와 1kHz A/D 변환 샘플링 주파수로 캡처할 수 없는 1100Hz의 고주파수 성분이 포함되어 있습니다. 스코프는 안티에일리어싱 없이 캡처된 신호와 안티에일리어싱을 사용해 캡처된 신호를 표시합니다. 안티에일리어싱 필터 사용 시, 50Hz 사인파 진폭이 진폭 1과 그에 대응하는 전력 0.5W(즉, 1옴 기준 부하에 대해 27dBm)로 올바르게 측정됩니다.