추정기
쿨롱 카운팅 알고리즘과 칼만 필터 알고리즘을 사용하여 배터리의 충전 상태, 단자 저항, 성능 상태(SOH: State Of Health), 성능을 추정합니다.
블록
추천 예제
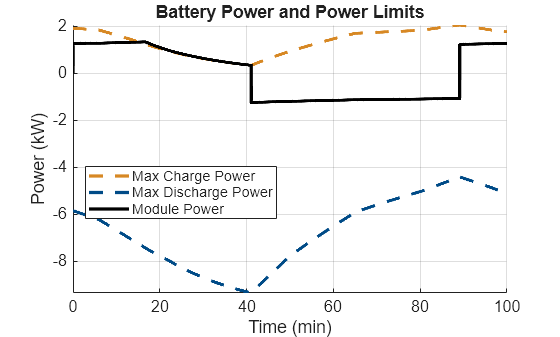
Estimate Maximum Charging and Discharging Power of Battery Module
Estimate the maximum charging and discharging power of a battery module by using the Battery Power Estimator block.
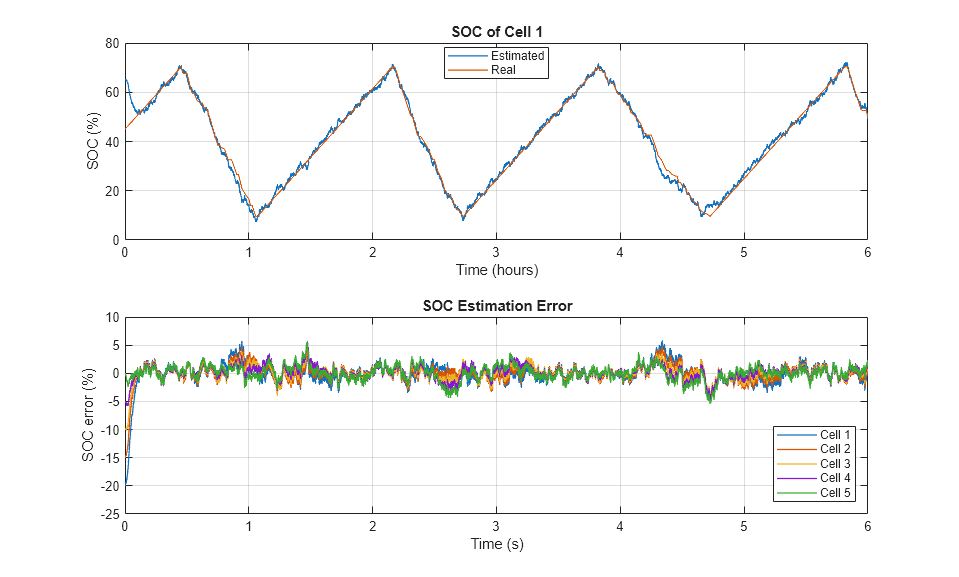
Estimate Battery State of Charge Using Bar-Delta Filtering
Estimate the state of charge (SOC) of a battery cell by using bar-delta filtering. The battery pack comprises five series-connected cells. Each battery cell has an initial SOC that varies between 0.45 and 0.65. The estimation technique uses a pack bar SOC estimator to obtain the pack-average SOC. A cell delta SOC estimator uses the pack-average SOC to estimate the cell SOC. The battery keeps charging and discharging for six hours. The estimator converges to the real value of the SOC in less than 10 minutes and then follows the real SOC value. The bar-delta filtering is computationally efficient as it uses one full Kalman filter and Ns one-state Kalman filters, where Ns is the number of series-connected cells.

Estimate State of Charge of Lithium Iron Phosphate Battery
Estimate the state of charge (SOC) of lithium iron phosphate (LFP) batteries by using the Coulomb Counting method with error correction. The Coulomb counting method is implemented at 1 second sample time. To correct the estimate of the Coulomb counting method, the example implements an extended Kalman filter with a sampling time of 10 seconds. The initial SOC of the battery is equal to 0.4. The estimator uses an initial condition for the SOC equal to 0.6. The LFP battery keeps charging and discharging for six hours. The estimator converges to the real value of the SOC in approximately half an hour and then follows the real SOC value.

배터리 충전 상태 추정
이 예제에서는 칼만 필터를 사용하여 배터리 SOC(충전 상태)를 추정하는 방법을 보여줍니다. 배터리의 초기 SOC는 0.5입니다. 추정기는 SOC 초기 조건으로 0.8을 사용합니다. 배터리는 6시간 동안 계속 충전되고 방전됩니다. 확장 칼만 필터 추정기는 10분 이내에 SOC의 실제 값으로 수렴한 다음 실제 SOC 값을 따라갑니다. 다른 칼만 필터 구현을 사용하려면 SOC Estimator(Kalman Filter) 블록에서 필터 유형 파라미터를 원하는 값으로 설정합니다.

배터리 성능 상태 추정
이 예제에서는 적응형 칼만 필터를 사용하여 배터리 내부 저항과 성능 상태(SOH)를 추정하는 방법을 보여줍니다. 배터리의 초기 충전 상태(SOC)는 0.6입니다. 추정기는 SOC 초기 조건으로 0.65를 사용합니다. 배터리는 10시간 동안 계속 충전되고 방전됩니다. 무향 칼만 필터 추정기는 SOC의 실제 값으로 수렴하는 동시에 내부 저항도 추정합니다. 다른 칼만 필터 구현을 사용하려면 SOC Estimator(Kalman Filter) 블록에서 필터 유형 파라미터를 원하는 값으로 설정합니다.

충전 상태 추정기로 배터리 모듈 충전 및 방전시키기
이 예제에서는 배터리 모듈을 주기적으로 충전 및 방전하면서 시간 경과에 따라 모듈 내 3개의 병렬 어셈블리에 대한 SOC(충전 상태)를 추정하는 방법을 보여줍니다. 또한 SOC 추정값을 사용하여 충전 프로파일과 방전 프로파일 간에 전환합니다. 칼만 필터는 추정을 위해 초기 SOC 추정값과 병렬 어셈블리의 전압, 전류, 온도를 사용합니다. 모델은 각 병렬 어셈블리의 셀 온도 평균값을 기반으로 병렬 어셈블리의 온도를 추정합니다.

용량 손실에 기반한 배터리 성능 상태 추정
이 예제에서는 칼만 필터를 사용하여 배터리 용량과 SOH(성능 상태)를 추정하는 방법을 보여줍니다. 배터리의 초기 SOC(충전 상태)는 0.5입니다. 추정기는 SOC 초기 조건으로 0.8을 사용합니다. 배터리는 50시간 동안 계속 충전되고 방전됩니다. 이 예제에서는 확장 칼만 필터를 사용하여 배터리 용량(단위: 암페어시)과 SOC를 추정합니다. 배터리 용량에 대한 추정 오차는 4% 미만입니다. SOC는 확장 칼만 필터를 사용하여 추정됩니다. 고정 용량을 사용하는 경우 추정된 SOC 값은 실제 값과 다릅니다. 추정기의 기능을 보여주고 시뮬레이션 지속 시간을 제한하기 위해 이 예제에서는 용량 손실률이 증가하는 경우를 모델링합니다.