tsa
시간 동기 신호 평균
구문
설명
ta = tsa(___,Name=Value)
tsa(___) 함수에 출력 인수를 지정하지 않으면 각 신호의 세그먼트에 대응하는 시간 영역 신호와 시간 동기 평균 신호를 현재 Figure에 플로팅합니다.
예제
잡음이 있는 정현파의 시간 동기 평균을 계산합니다.
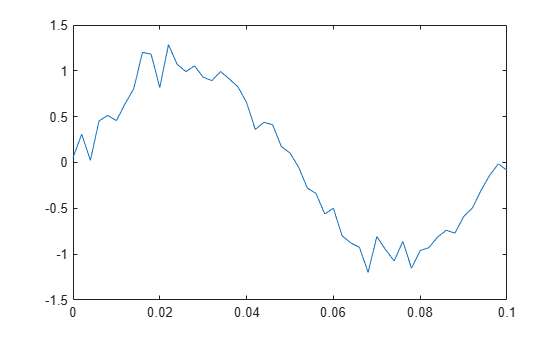
백색 가우스 잡음에 묻혀 있는 정현파로 구성된 신호를 생성합니다. 이 신호는 20초간 500Hz로 샘플링됩니다. 정현파 주파수를 10Hz로, 잡음 분산을 0.01로 지정합니다. 신호의 어떤 한 주기를 플로팅합니다.
fs = 500; t = 0:1/fs:20-1/fs; f0 = 10; y = sin(2*pi*f0*t) + randn(size(t))/10; plot(t,y) xlim([0 1/f0])
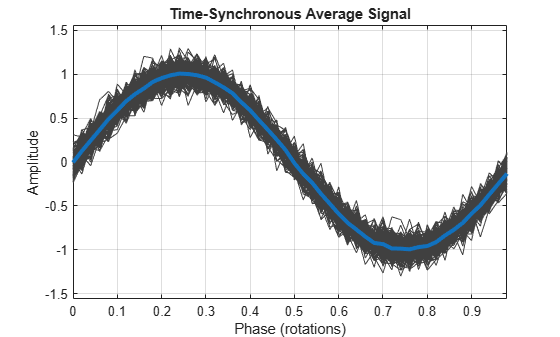
신호의 시간 동기 평균을 계산합니다. 동기 신호의 경우 정현파와 같은 주기의 펄스 신호 집합을 사용합니다. 출력 인수 없이 tsa를 사용하여 결과를 표시합니다.
tPulse = 0:1/f0:max(t); tsa(y,fs,tPulse)
지수적으로 감쇠하는 2차 처프로 구성된 신호를 생성합니다. 신호는 2초 동안 1kHz로 샘플링됩니다. 처프의 초기 주파수는 2Hz이고, 처음 1초가 지나면 28Hz로 증가합니다. 감쇠의 특성 시간은 1/2초입니다. 신호를 플로팅합니다.
fs = 1e3;
t = 0:1/fs:2;
x = exp(-2*t').*chirp(t',2,1,28,'quadratic');
plot(t,x)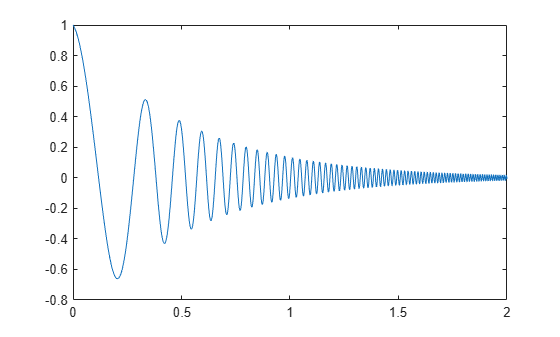
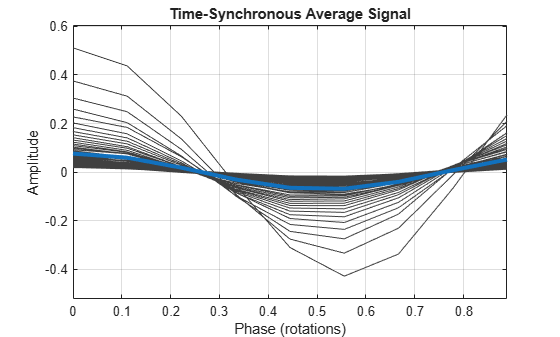
시간 벡터를 사용하여 duration형 배열을 만듭니다. duration형 배열과 신호를 사용하여 타임테이블을 생성합니다. 신호 피크의 위치를 사용하여 펄스 시간을 확인합니다. 시간 동기 평균을 표시합니다.
ts = seconds(t)'; tx = timetable(ts,x); [~,lc] = findpeaks(x,t); tsa(tx,lc)
시간 동기 평균을 계산합니다. 출력 인수의 유형을 표시합니다. 샘플 시간이 duration형 배열에 저장됩니다.
[xta,xt,xp,xrpm] = tsa(tx,lc);
whos x*Name Size Bytes Class Attributes x 2001x1 16008 double xp 9x1 1091 timetable xrpm 1x1 8 double xt 9x1 88 duration xta 9x1 1087 timetable
duration형 배열을 datetime형 벡터로 변환합니다. datetime형 벡터와 신호를 사용하여 타임테이블을 생성합니다. 시간 동기 평균을 계산하되 이번에는 15회전 세트에 대한 평균을 구합니다.
출력 인수의 유형을 표시합니다. 입력 타임테이블에서 datetime형 벡터를 사용했더라도 샘플 시간이 duration형 배열에 다시 저장됩니다.
dtb = datetime(datevec(ts));
dtt = timetable(dtb,x);
nr = 15;
tsa(dtt,lc,'NumRotations',nr)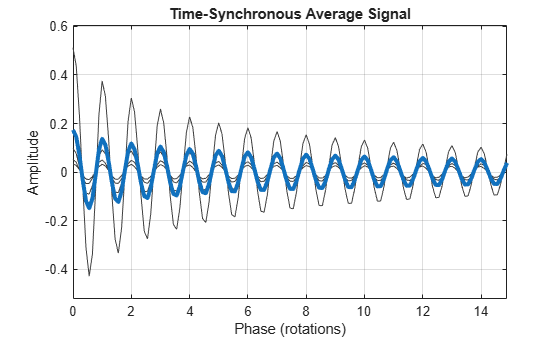
[dta,dt,dp,drpm] = tsa(dtt,lc,'NumRotations',nr); whos d*
Name Size Bytes Class Attributes dp 135x1 3107 timetable drpm 1x1 8 double dt 135x1 1096 duration dta 135x1 3103 timetable dtb 2001x1 32016 datetime dtt 2001x1 48945 timetable
스위치를 끈 후 속도가 느려지는 선풍기 날의 위치에 대해 시간 동기 평균을 계산합니다.
2400rpm으로 회전하는 책상용 선풍기가 꺼지는 경우를 생각해 보겠습니다. 공기 저항(및 무시할 수 있는 정도로 미미한 베어링 마찰)으로 인해 선풍기의 날개가 약 5초 후 멈춥니다. 고속 카메라가 1kHz의 속도로 선풍기 날개 중 하나의 x 좌표를 측정합니다.
fs = 1000; t = 0:1/fs:5-1/fs; rpm0 = 2400;
중심에서 반경 10cm로 회전하는 점질량으로 이 선풍기 날개를 이상화합니다. 날개에 속도에 비례하는 끄는 힘이 적용되므로 위상각에 대한 다음 표현식이 성립합니다.
은 초기 주파수, 초는 감쇠 시간입니다.
a = 0.1; f0 = rpm0/60; T = 0.75; phi = 2*pi*f0*T*(1-exp(-t/T));
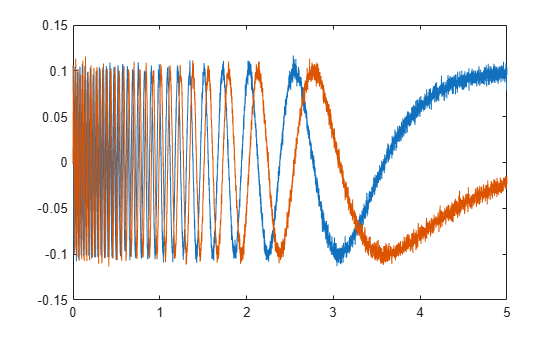
x 및 y 좌표를 계산하고 플로팅합니다. 백색 가우스 잡음을 추가합니다.
x = a*cos(phi) + randn(size(phi))/200; y = a*sin(phi) + randn(size(phi))/200; plot(t,x,t,y)
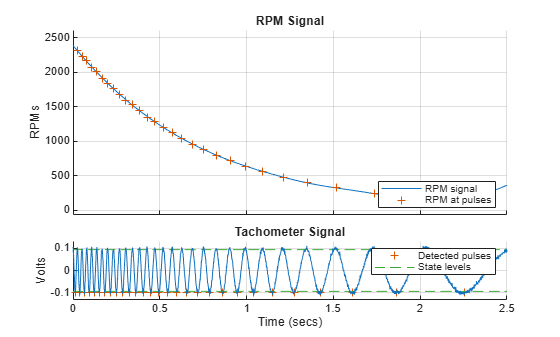
동기 신호를 알아보겠습니다. tachorpm 함수를 사용하여 펄스 시간을 구합니다. 검색 범위를 2.5초 이전의 시간까지로 제한합니다. 지수적 감쇠를 보려면 회전 속도를 플로팅하십시오.
[rpm,~,tp] = tachorpm(x(t<2.5),fs); tachorpm(x(t<2.5),fs)
정현파의 한 주기에 해당하는 시간 동기 평균 신호를 계산하고 플로팅합니다. 주파수 영역에서 평균을 구합니다.
clf
tsa(x,fs,tp,Method="fft")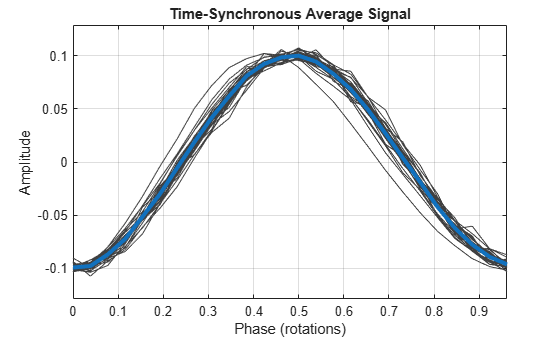
입력 인수
이름-값 인수
출력 인수
알고리즘
입력 신호, 샘플 레이트, 회전속도계 펄스 세트가 주어지면 tsa는 다음 단계를 수행합니다.
회전속도계 펄스 및
PulsesPerRotation에 지정된 값을 기반으로 사이클 시작 시간 및 종료 시간을 확인합니다.'ResampleFactor'에 지정된 값을 기반으로 입력 신호를 리샘플링합니다.'Method'에 지정된 옵션을 기반으로 리샘플링된 신호의 평균을 구합니다.Method가"fft"로 설정된 경우 함수는 다음을 수행합니다.신호를 각기 다른 사이클에 해당하는 세그먼트로 나눕니다.
각 세그먼트의 이산 푸리에 변환을 계산합니다.
길이가 긴 변환을 잘라내어 모든 변환의 길이를 같게 합니다.
스펙트럼의 평균을 구합니다.
시간 영역으로 변환하기 위해 평균의 이산 푸리에 역변환을 계산합니다.
Method가 시간 영역 방법 중 하나로 설정된 경우 함수는 다음을 수행합니다.지정된 방법을 사용하여 서로 다른 사이클에 대응하는 샘플 간 간격이 동일한 그리드에 신호를 보간합니다.
NumRotations에 지정된 값을 기반으로 리샘플링된 신호 세그먼트를 결합합니다.모든 세그먼트의 평균을 계산합니다.
참고 문헌
[1] Bechhoefer, Eric, and Michael Kingsley. "A Review of Time-Synchronous Average Algorithms." Proceedings of the Annual Conference of the Prognostics and Health Management Society, San Diego, CA, September-October, 2009.
확장 기능
버전 내역
R2017b에 개발됨