tf2ss
전달 함수 필터 파라미터를 상태공간 형식으로 변환
설명
예제
다음 전달 함수로 정의되는 시스템이 있다고 가정하겠습니다.
tf2ss를 사용하여 이 시스템을 상태공간 형식으로 변환합니다.
b = [0 2 3; 1 2 1]; a = [1 0.4 1]; [A,B,C,D] = tf2ss(b,a)
A = 2×2
-0.4000 -1.0000
1.0000 0
B = 2×1
1
0
C = 2×2
2.0000 3.0000
1.6000 0
D = 2×1
0
1
1차원의 이산시간 진동 시스템은 단위 탄성 상수를 갖는 스프링으로 벽에 연결된 단위 질량 으로 구성됩니다. 센서가 질량의 가속도 를 Hz로 샘플링합니다.

50개의 시간 샘플을 생성합니다. 샘플링 간격을 로 정의합니다.
Fs = 5; dt = 1/Fs; N = 50; t = dt*(0:N-1); u = [1 zeros(1,N-1)];
시스템의 전달 함수는 다음과 같은 해석적 표현을 갖습니다.
.
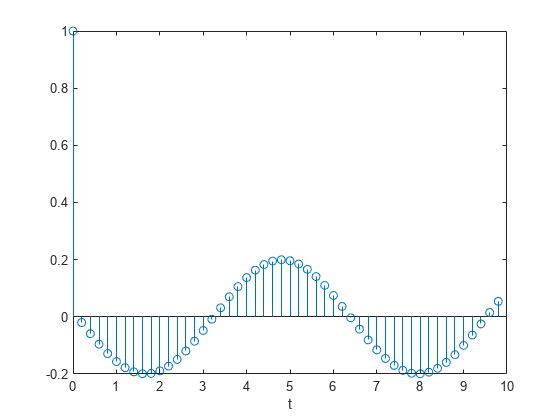
시스템에 양의 방향으로 단위 임펄스를 가합니다. 전달 함수를 사용하여 시스템의 시간 변화를 계산합니다. 응답을 플로팅합니다.
bf = [1 -(1+cos(dt)) cos(dt)]; af = [1 -2*cos(dt) 1]; yf = filter(bf,af,u); stem(t,yf,"o") xlabel("t")
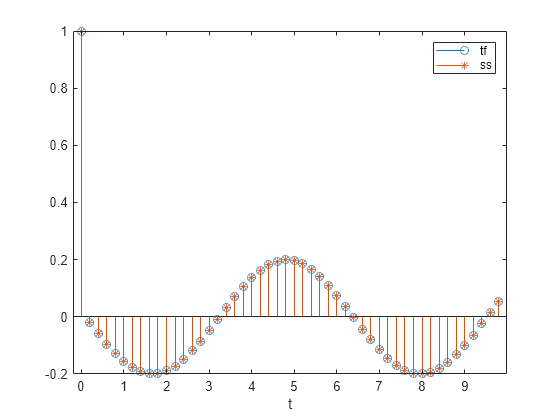
시스템의 상태공간 표현을 구합니다. 모두 0으로 구성된 초기 상태에서 시작하여 시간 변화를 계산합니다. 이를 전달 함수 예측값과 비교합니다.
[A,B,C,D] = tf2ss(bf,af); x = [0;0]; for k = 1:N y(k) = C*x + D*u(k); x = A*x + B*u(k); end hold on stem(t,y,"*") hold off legend("tf","ss")
입력 인수
출력 인수
세부 정보
확장 기능
버전 내역
R2006a 이전에 개발됨