ss2tf
상태공간 표현식(State-Space Representation)을 전달 함수로 변환하기
설명
예제
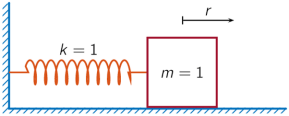
1차원의 이산시간 진동 시스템은 단위 탄성 상수를 갖는 스프링으로 벽에 연결된 단위 질량 으로 구성됩니다. 센서가 질량의 가속도 를 Hz로 샘플링합니다.
50개의 시간 샘플을 생성합니다. 샘플링 간격 을 정의합니다.
Fs = 5; dt = 1/Fs; N = 50; t = dt*(0:N-1);
진동자는 상태공간 방정식(State-Space Equation)으로 설명할 수 있습니다.
여기서 은 상태 벡터로, 과 는 질량의 위치와 속도를 각각 나타내고, 행렬은 다음과 같습니다.
A = [cos(dt) sin(dt);-sin(dt) cos(dt)]; B = [1-cos(dt);sin(dt)]; C = [-1 0]; D = 1;
시스템에 양의 방향으로 단위 임펄스를 가합니다. 상태공간 모델을 사용하여 모든 초기 상태값이 0인 시공간 시스템의 변화를 계산합니다.
u = [1 zeros(1,N-1)]; x = [0;0]; for k = 1:N y(k) = C*x + D*u(k); x = A*x + B*u(k); end
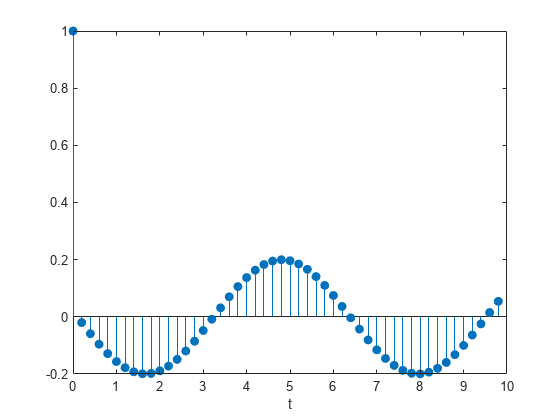
질량의 가속도를 시간 함수로 플로팅합니다.
stem(t,y,'filled') xlabel('t')
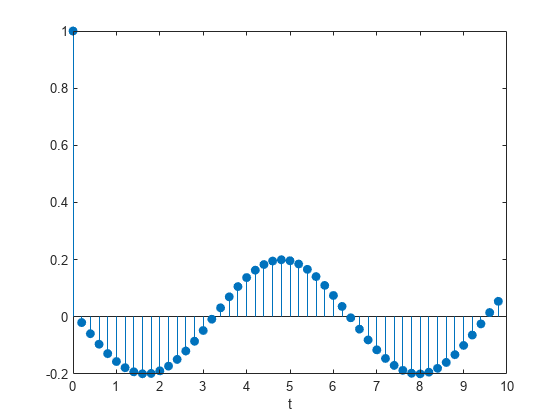
전달 함수 H(z)를 사용하여 시간 종속 가속도를 계산하여 입력값을 필터링합니다. 결과를 플로팅합니다.
[b,a] = ss2tf(A,B,C,D); yt = filter(b,a,u); stem(t,yt,'filled') xlabel('t')
시스템의 전달 함수는 다음과 같은 해석적 표현을 갖습니다.
표현식을 사용하여 입력값을 필터링합니다. 응답을 플로팅합니다.
bf = [1 -(1+cos(dt)) cos(dt)]; af = [1 -2*cos(dt) 1]; yf = filter(bf,af,u); stem(t,yf,'filled') xlabel('t')

결과는 세 가지 경우 모두 동일합니다.
이상적인 1차원 진동 시스템은 두 벽 사이에 있는 두 개의 단위 질량 과 로 구성됩니다. 각 질량은 단위 탄성 상수를 갖는 스프링으로 가장 가까운 벽에 연결됩니다. 이러한 또 다른 스프링이 두 질량을 연결합니다. 센서가 질량의 가속도인 과 를 Hz로 샘플링합니다.

총 측정 시간을 16초로 지정합니다. 샘플링 간격 을 정의합니다.
Fs = 16; dt = 1/Fs; N = 257; t = dt*(0:N-1);
시스템은 다음 상태공간 모델로 설명할 수 있습니다.
여기서 은 상태 벡터로, 와 는 각각 번째 질량의 위치와 속도를 나타냅니다. 입력 벡터 이고 출력 벡터 입니다. 상태공간 행렬은 다음과 같습니다.
연속시간 상태공간 행렬은 다음과 같습니다.
는 적절한 크기의 단위 행렬을 나타냅니다.
Ac = [0 1 0 0; -2 0 1 0; 0 0 0 1; 1 0 -2 0]; A = expm(Ac*dt); Bc = [0 0; 1 0; 0 0; 0 1]; B = Ac\(A-eye(4))*Bc; C = [-2 0 1 0; 1 0 -2 0]; D = eye(2);
첫 번째 질량 이 양의 방향으로 단위 임펄스를 받습니다.
ux = [1 zeros(1,N-1)]; u0 = zeros(1,N); u = [ux;u0];
모델을 사용하여 모든 항목이 0인 초기 상태에서 시스템의 시간 변화를 계산합니다.
x = [0 0 0 0]'; y = zeros(2,N); for k = 1:N y(:,k) = C*x + D*u(:,k); x = A*x + B*u(:,k); end
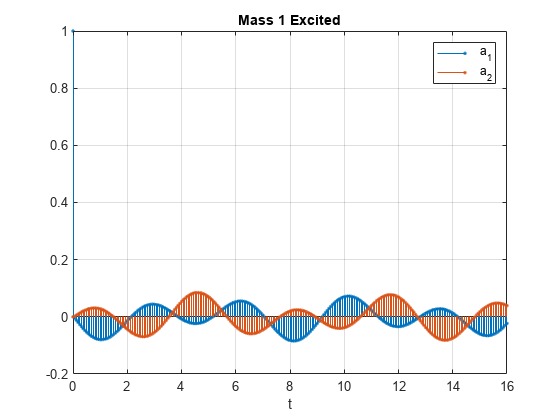
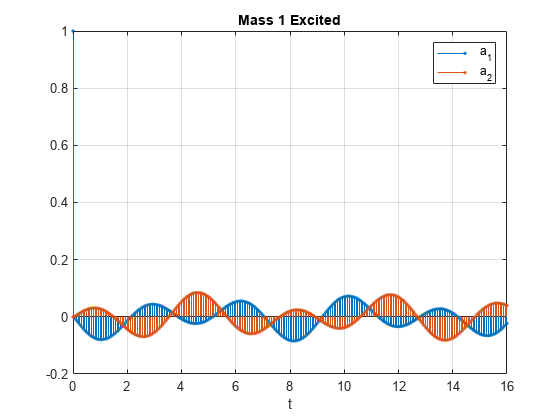
두 질량의 가속도를 시간 함수로 플로팅합니다.
stem(t,y','.') xlabel('t') legend('a_1','a_2') title('Mass 1 Excited') grid
시스템을 전달 함수 표현식으로 변환합니다. 시스템이 첫 번째 질량에 양의 단위 임펄스를 받아 어떤 반응을 하는지 알아봅니다.
[b1,a1] = ss2tf(A,B,C,D,1); y1u1 = filter(b1(1,:),a1,ux); y1u2 = filter(b1(2,:),a1,ux);
결과를 플로팅합니다. 전달 함수를 사용해도 상태공간 모델을 사용한 것과 반응이 동일합니다.
stem(t,[y1u1;y1u2]','.') xlabel('t') legend('a_1','a_2') title('Mass 1 Excited') grid
시스템이 초기 구성으로 초기화됩니다. 이제 다른 질량 가 양의 방향으로 단위 임펄스를 받습니다. 시스템의 시간 변화를 계산합니다.
u = [u0;ux]; x = [0;0;0;0]; for k = 1:N y(:,k) = C*x + D*u(:,k); x = A*x + B*u(:,k); end
가속도를 플로팅합니다. 각 질량의 반응이 바뀝니다.
stem(t,y','.') xlabel('t') legend('a_1','a_2') title('Mass 2 Excited') grid
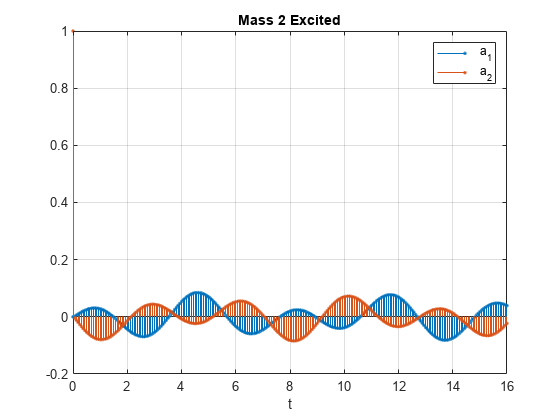
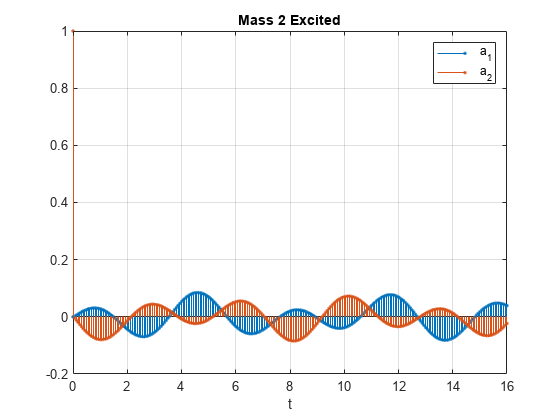
시스템이 두 번째 질량에 양의 단위 임펄스를 받아 어떤 반응을 하는지 알아봅니다.
[b2,a2] = ss2tf(A,B,C,D,2); y2u1 = filter(b2(1,:),a2,ux); y2u2 = filter(b2(2,:),a2,ux);
결과를 플로팅합니다. 전달 함수를 사용해도 상태공간 모델을 사용한 것과 반응이 동일합니다.
stem(t,[y2u1;y2u2]','.') xlabel('t') legend('a_1','a_2') title('Mass 2 Excited') grid
입력 인수
출력 인수
세부 정보
버전 내역
R2006a 이전에 개발됨