impinvar
아날로그에서 디지털로의 필터 변환에 사용하는 임펄스 불변 방법
설명
예제
임펄스 불변을 사용하여 6차 아날로그 버터워스 저역통과 필터를 디지털 필터로 변환합니다. 샘플 레이트를 10Hz, 차단 주파수를 2Hz로 지정합니다. 필터의 주파수 응답을 표시합니다.
f = 2;
fs = 10;
[b,a] = butter(6,2*pi*f,'s');
[bz,az] = impinvar(b,a,fs);
freqz(bz,az,1024,fs)
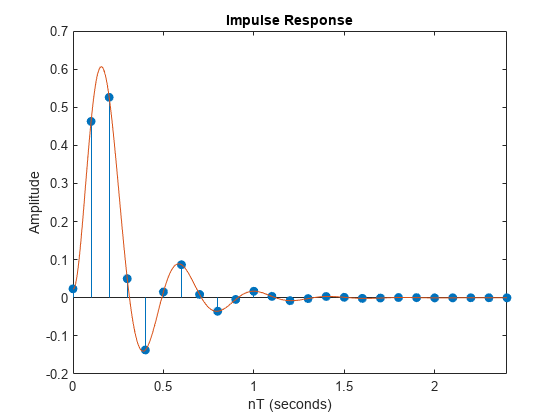
임펄스 불변을 사용하여 3차 아날로그 타원 필터를 디지털 필터로 변환합니다. 샘플 레이트를 Hz로, 통과대역 경계 주파수를 2.5Hz로, 통과대역 리플을 1dB로, 저지대역 감쇠량을 60dB로 지정합니다. 디지털 필터의 임펄스 응답을 표시합니다.
fs = 10;
[b,a] = ellip(3,1,60,2*pi*2.5,'s');
[bz,az] = impinvar(b,a,fs);
impz(bz,az,[],fs)
전달 함수의 유수 와 극점 를 구하고 다음을 사용하여 명시적으로 라플라스 변환을 역변환함으로써 아날로그 필터의 임펄스 응답을 구합니다.
아날로그 필터의 임펄스 응답을 겹쳐 표시합니다. 임펄스 불변으로 인해 디지털 필터에 의 이득이 발생합니다. 유의미한 비교가 이루어지도록 이 이득과 아날로그 임펄스 응답을 곱합니다.
[r,p] = residue(b,a); t = linspace(0,4,1000); h = real(r.'*exp(p.*t)/fs); hold on plot(t,h) hold off
입력 인수
출력 인수
알고리즘
impinvar은 참고 문헌 [2]에 설명된, 아날로그에서 디지털로의 전달 함수 변환을 위한 임펄스 불변 방법을 수행합니다.
시스템에서
b와a로 표현되는 부분 분수 전개를 구합니다.극점
p를 극점exp(p/fs)로 대체합니다.1단계의 부분 분수 전개에서 얻어진 유수와 2단계의 극점으로 시스템의 전달 함수 계수를 구합니다.
참고 문헌
[1] Antoniou, Andreas. Digital Filters. New York: McGraw-Hill, Inc., 1993.
[2] Parks, Thomas W., and C. Sidney Burrus. Digital Filter Design. New York: John Wiley & Sons, 1987.
버전 내역
R2006a 이전에 개발됨