bilinear
아날로그에서 디지털로의 필터 변환을 위한 쌍선형 변환 방법
구문
설명
이 함수를 사용하여 연속시간 전달 함수를 그에 상응하는 이산시간 전달 함수로 변환할 수 있습니다.
예제
6dB의 통과대역 리플을 갖는 10차 체비쇼프 유형 I 필터의 프로토타입을 설계합니다. 프로토타입을 상태공간 형식으로 변환합니다.
[z,p,k] = cheb1ap(10,6); [A,B,C,D] = zp2ss(z,p,k);
프로토타입을 대역통과 필터로 변환하여, 레이트로 샘플링될 때 상응하는 디지털 필터의 통과대역 경계가 100Hz와 500Hz가 되도록 합니다. 이 변환을 위해, 사전 워핑이 적용된 대역 경계 과 (단위: rad/s), 중심 주파수 , 대역폭 을 지정합니다.
fs = 2e3; f1 = 100; u1 = 2*fs*tan(f1*(2*pi/fs)/2); f2 = 500; u2 = 2*fs*tan(f2*(2*pi/fs)/2); [At,Bt,Ct,Dt] = lp2bp(A,B,C,D,sqrt(u1*u2),u2-u1);
freqs를 사용하여 아날로그 필터의 주파수 응답을 계산합니다. 크기 응답과 사전 워핑이 적용된 주파수 대역 경계를 플로팅합니다.
[b,a] = ss2tf(At,Bt,Ct,Dt); [h,w] = freqs(b,a,2048); plot(w,mag2db(abs(h))) xline([u1 u2],"-",["Lower" "Upper"]+" passband edge", ... LabelVerticalAlignment="middle") ylim([-165 5]) xlabel("Angular frequency (rad/s)") ylabel("Magnitude (dB)") grid

bilinear 함수를 사용하여 샘플 레이트가 인 디지털 대역통과 필터를 만듭니다.
[Ad,Bd,Cd,Dd] = bilinear(At,Bt,Ct,Dt,fs);
freqz를 사용하여 디지털 필터를 상태공간 형식에서 2차섹션형(SOS)으로 변환하고 주파수 응답을 계산합니다. 크기 응답과 통과대역 경계를 플로팅합니다.
[hd,fd] = freqz(ss2sos(Ad,Bd,Cd,Dd),2048,fs); plot(fd,mag2db(abs(hd))) xline([f1 f2],"-",["Lower" "Upper"]+" passband edge", ... LabelVerticalAlignment="middle") ylim([-165 5]) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)") grid

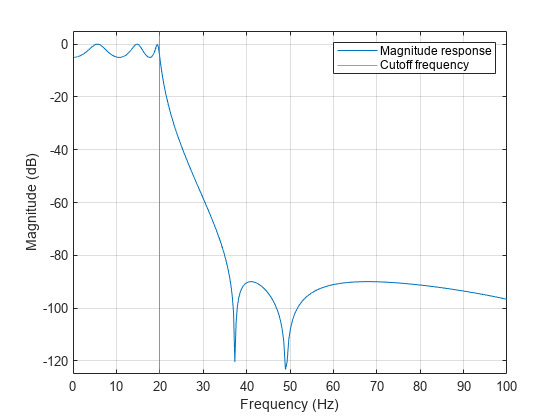
5dB의 통과대역 리플, 90dB의 저지대역 감쇠량 및 차단 주파수 를 갖는 6차 타원 아날로그 저역통과 필터를 설계합니다.
fc = 20;
[z,p,k] = ellip(6,5,90,2*pi*fc,"s");아날로그 타원 필터의 크기 응답을 시각화합니다. 차단 주파수를 표시합니다.
[num,den] = zp2tf(z,p,k); [h,w] = freqs(num,den,1024); plot(w/(2*pi),mag2db(abs(h))) xline(fc,Color=[0.8500 0.3250 0.0980]) axis([0 100 -125 5]) grid legend(["Magnitude response" "Cutoff frequency"]) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)")
bilinear 함수를 사용하여 아날로그 필터를 이산시간 IIR 필터로 변환합니다. 샘플 레이트 와 사전 워핑 일치 주파수 를 지정합니다.
fs = 200; fp = 20; [zd,pd,kd] = bilinear(z,p,k,fs,fp);
이산시간 필터의 크기 응답을 시각화합니다. 차단 주파수를 표시합니다.
[hd,fd] = freqz(zp2sos(zd,pd,kd),[],fs); plot(fd,mag2db(abs(hd))) xline(fc,Color=[0.8500 0.3250 0.0980]) axis([0 100 -125 5]) grid legend(["Magnitude response" "Cutoff frequency"]) xlabel("Frequency (Hz)") ylabel("Magnitude (dB)")

입력 인수
출력 인수
알고리즘
참고 문헌
[1] Al-Saggaf, Ubaid M., and Gene F. Franklin. “Model Reduction via Balanced Realizations: An Extension and Frequency Weighting Techniques.” IEEE Transactions on Automatic Control 33, no. 7 (July 1988): 687–92. https://doi.org/10.1109/9.1280.
[2] Oppenheim, Alan V., and Ronald W. Schafer, with John R. Buck. Discrete-Time Signal Processing. Upper Saddle River, NJ: Prentice Hall, 1999.
[3] Parks, Thomas W., and C. Sidney Burrus. Digital Filter Design. New York: John Wiley & Sons, 1987.
[4] Tustin, Arnold. “A Method of Analysing the Behaviour of Linear Systems in Terms of Time Series.” Journal of the Institution of Electrical Engineers - Part IIA: Automatic Regulators and Servo Mechanisms 94, no. 1 (May 1947): 130–42. https://doi.org/10.1049/ji-2a.1947.0020.
확장 기능
버전 내역
R2006a 이전에 개발됨