dtw
동적 시간 워핑을 사용한 신호 간 거리
설명
예제
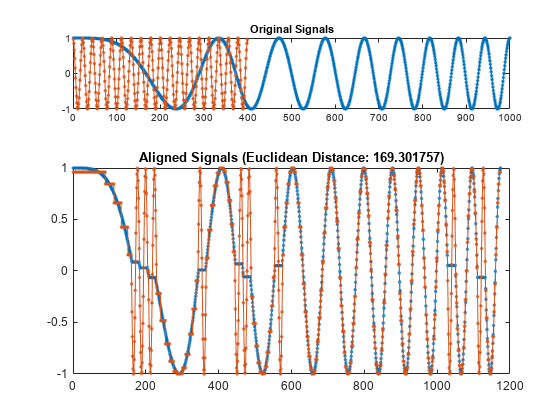
처프와 정현파 각각 하나씩 두 개의 실수 신호를 생성합니다.
x = cos(2*pi*(3*(1:1000)/1000).^2); y = cos(2*pi*9*(1:399)/400);
점 간의 유클리드 거리 합이 가장 작도록 동적 시간 워핑을 사용하여 신호를 정렬합니다. 정렬된 신호와 거리를 표시합니다.
dtw(x,y);

정현파 주파수를 초기값의 두 배가 되도록 변경합니다. 계산을 반복합니다.
y = cos(2*pi*18*(1:399)/400); dtw(x,y);
각 신호에 허수부를 추가합니다. 초기 정현파 주파수를 복원합니다. 동적 시간 워핑을 사용하여 유클리드 거리 제곱합을 최소화하는 방식으로 신호를 정렬합니다.
x = exp(2i*pi*(3*(1:1000)/1000).^2);
y = exp(2i*pi*9*(1:399)/400);
dtw(x,y,'squared');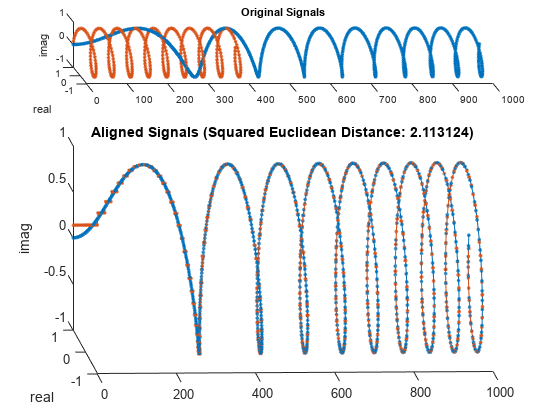
초기 컴퓨터의 출력값과 비슷한 서체를 고안해 보겠습니다. 이를 사용하여 MATLAB®이라는 단어를 씁니다.
chr = @(x)dec2bin(x')-48; M = chr([34 34 54 42 34 34 34]); A = chr([08 20 34 34 62 34 34]); T = chr([62 08 08 08 08 08 08]); L = chr([32 32 32 32 32 32 62]); B = chr([60 34 34 60 34 34 60]); MATLAB = [M A T L A B];
문자로 구성된 난수 열을 반복하고 간격을 다양하게 지정하는 방식으로 단어에 변경을 줍니다. 원래 단어와 세 개의 변경된 형태를 표시합니다. 재현 가능한 결과를 얻기 위해 난수 생성기를 재설정합니다.
rng('default') c = @(x)x(:,sort([1:6 randi(6,1,3)])); subplot(4,1,1,'XLim',[0 60]) spy(MATLAB) xlabel('') ylabel('Original') for kj = 2:4 subplot(4,1,kj,'XLim',[0 60]) spy([c(M) c(A) c(T) c(L) c(A) c(B)]) xlabel('') ylabel('Corrupted') end

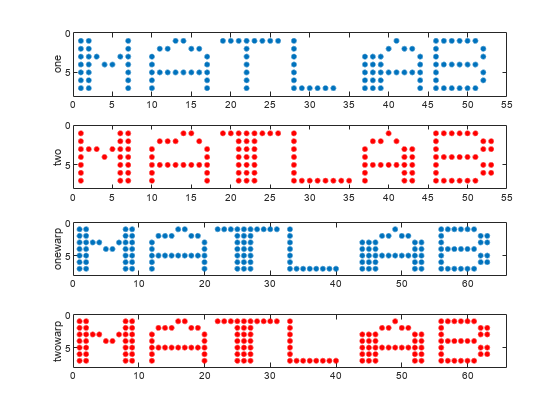
이 단어에 대해 변경된 형태 두 개를 더 생성합니다. 동적 시간 워핑을 사용하여 이 형태들을 정렬합니다.
one = [c(M) c(A) c(T) c(L) c(A) c(B)]; two = [c(M) c(A) c(T) c(L) c(A) c(B)]; [ds,ix,iy] = dtw(one,two); onewarp = one(:,ix); twowarp = two(:,iy);
정렬되지 않은 단어와 정렬된 단어를 표시합니다.
figure subplot(4,1,1) spy(one) xlabel('') ylabel('one') subplot(4,1,2) spy(two,'r') xlabel('') ylabel('two') subplot(4,1,3) spy(onewarp) xlabel('') ylabel('onewarp') subplot(4,1,4) spy(twowarp,'r') xlabel('') ylabel('twowarp')
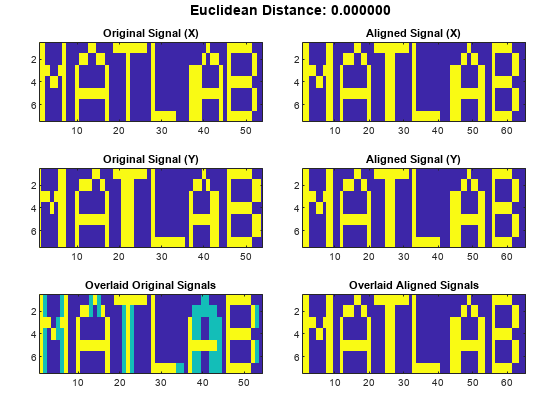
dtw의 내장된 기능을 사용하여 계산을 반복합니다.
dtw(one,two);
길이가 각각 다른 골로 구분된 두 개의 서로 다른 피크로 구성된 두 개의 신호를 생성합니다. 신호를 플로팅합니다.
x1 = [0 1 0 0 0 0 0 0 0 0 0 1 0]*.95; x2 = [0 1 0 1 0]*.95; subplot(2,1,1) plot(x1) xl = xlim; subplot(2,1,2) plot(x2) xlim(xl)
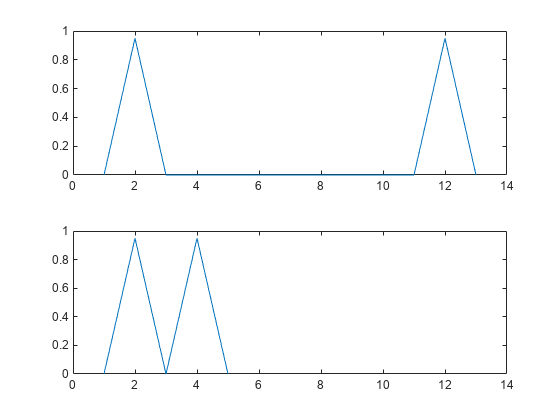
워핑 경로에 제한 없이 신호를 정렬합니다. 완벽하게 정렬하기 위해 이 함수는 더 짧은 신호 샘플 하나만 반복해야 합니다.
figure dtw(x1,x2);

워핑 경로와 두 신호 간 직선 피팅을 플로팅합니다. 이 함수는 정렬을 위해 피크 사이의 골을 넉넉하게 확장합니다.
[d,i1,i2] = dtw(x1,x2);
figure
plot(i1,i2,'o-',[i1(1) i1(end)],[i2(1) i2(end)])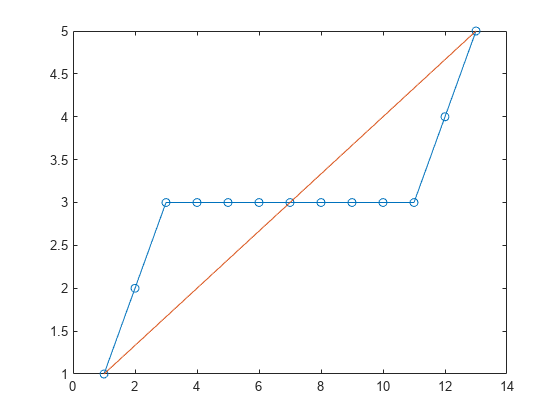
계산을 반복하되, 이번에는 제약 조건을 적용하여 워핑 경로가 직선 피팅에서 3개 요소를 초과해 벗어나지 않도록 합니다. 확장된 신호와 워핑 경로를 플로팅합니다.
[dc,i1c,i2c] = dtw(x1,x2,3); subplot(2,1,1) plot([x1(i1c);x2(i2c)]','.-') title(['Distance: ' num2str(dc)]) subplot(2,1,2) plot(i1c,i2c,'o-',[i1(1) i1(end)],[i2(1) i2(end)])
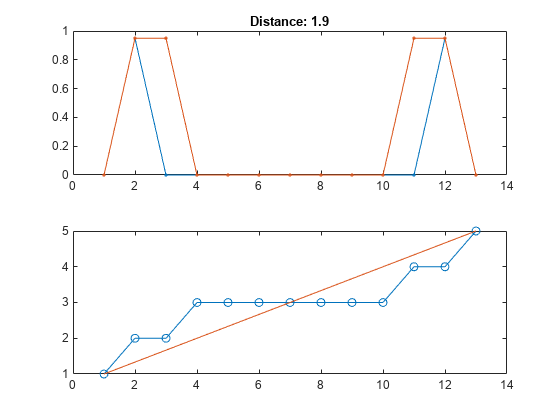
제약 조건을 적용하면 워핑이 샘플의 일부에 너무 많이 집중되지 않도록 합니다. 단, 정렬 품질이 낮아집니다. 단일 샘플 제약 조건을 사용하여 계산을 반복합니다.
dtw(x1,x2,1);

로 샘플링된 음성 신호를 불러옵니다. 이 파일에는 "MATLAB®"이라는 단어를 발음한 여성의 음성이 들어 있습니다.
load mtlb % To hear, type soundsc(mtlb,Fs)
/æ/ 음소가 발생하는 두 건의 경우에 대응하는 두 세그먼트를 추출합니다. 첫 번째 세그먼트는 대략 150ms에서 250ms 사이에 있고, 두 번째 세그먼트는 370ms에서 450ms 사이에 있습니다. 두 파형을 플로팅합니다.
a1 = mtlb(round(0.15*Fs):round(0.25*Fs)); a2 = mtlb(round(0.37*Fs):round(0.45*Fs)); subplot(2,1,1) plot((0:numel(a1)-1)/Fs+0.15,a1) title('a_1') subplot(2,1,2) plot((0:numel(a2)-1)/Fs+0.37,a2) title('a_2') xlabel('Time (seconds)')

% To hear, type soundsc(a1,Fs), pause(1), soundsc(a2,Fs)신호 간 유클리드 거리가 최소화되도록 시간 축에 워핑을 적용합니다. 워핑이 적용된 신호에서 공유된 "기간"을 계산하고 플로팅합니다.
[d,i1,i2] = dtw(a1,a2); a1w = a1(i1); a2w = a2(i2); t = (0:numel(i1)-1)/Fs; duration = t(end)
duration = 0.1297
subplot(2,1,1) plot(t,a1w) title('a_1, Warped') subplot(2,1,2) plot(t,a2w) title('a_2, Warped') xlabel('Time (seconds)')

% To hear, type soundsc(a1w,Fs), pause(1), sound(a2w,Fs)하나의 완전한 단어에 대해 같은 실험을 반복합니다. "strong"이라는 단어를 발음한 여성과 남성의 음성이 들어 있는 파일을 불러옵니다. 신호는 8kHz로 샘플링되었습니다.
load('strong.mat') % To hear, type soundsc(her,fs), pause(2), soundsc(him,fs)
신호 간 절대 거리가 최소화되도록 시간 축에 워핑을 적용합니다. 원래 신호와 변환된 신호를 플로팅합니다. 워핑이 적용된 기간 중에 공유된 "기간"을 계산합니다.
dtw(her,him,'absolute'); legend('her','him')

[d,iher,ihim] = dtw(her,him,'absolute');
duration = numel(iher)/fsduration = 0.8394
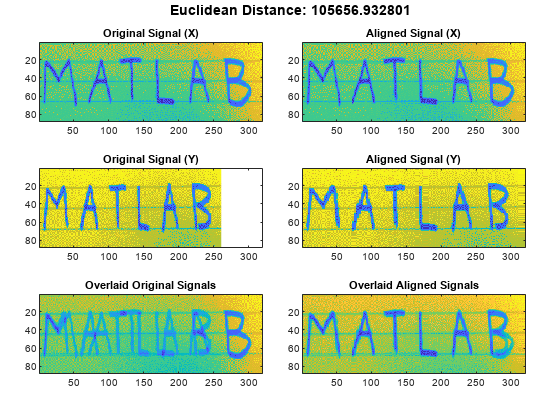
% To hear, type soundsc(her(iher),fs), pause(2), soundsc(him(ihim),fs)파일 MATLAB1.gif와 MATLAB2.gif에는 "MATLAB®"이라는 단어를 손으로 쓴 샘플 두 개가 포함되어 있습니다. 파일을 불러오고 동적 시간 워핑을 사용하여 x축을 따라 정렬합니다.
samp1 = 'MATLAB1.gif'; samp2 = 'MATLAB2.gif'; x = double(imread(samp1)); y = double(imread(samp2)); dtw(x,y);
입력 인수
출력 인수
세부 정보
참고 문헌
[1] Paliwal, K. K., Anant Agarwal, and Sarvajit S. Sinha. "A Modification over Sakoe and Chiba’s Dynamic Time Warping Algorithm for Isolated Word Recognition." Signal Processing. Vol. 4, 1982, pp. 329–333.
[2] Sakoe, Hiroaki, and Seibi Chiba. "Dynamic Programming Algorithm Optimization for Spoken Word Recognition." IEEE® Transactions on Acoustics, Speech, and Signal Processing. Vol. ASSP-26, No. 1, 1978, pp. 43–49.
확장 기능
버전 내역
R2016a에 개발됨
참고 항목
alignsignals | edr | finddelay | findsignal | xcorr