Write a ROS Image Message in Simulink
This example shows how to write an image message and publish it to a ROS network in Simulink®.
Start a ROS network.
rosinit
Launching ROS Core... Done in 0.63739 seconds. Initializing ROS master on http://172.20.17.249:50152. Initializing global node /matlab_global_node_29805 with NodeURI http://dcc2873394glnxa64:39067/ and MasterURI http://localhost:50152.
Load a sample image. Create a subscriber to receive a ROS Image message on the /image topic. Specify the message type as sensor_msgs/Image and the data format as struct.
exampleHelperROSLoadImageData sub = rossubscriber("/image","sensor_msgs/Image",DataFormat="struct");
Open the Simulink model for writing and publishing ROS Image message.
open_system("write_image_example_model.slx");
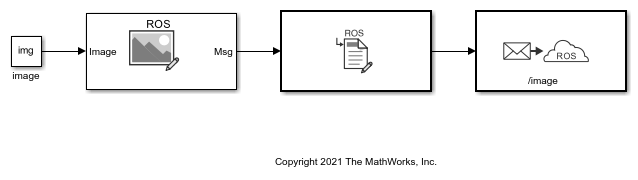
Ensure that the Publish block is publishing to the /image topic. Under the Simulation tab, select ROS Toolbox > Variable Size Arrays and verify the Data array has a maximum length greater than the length of the Data field in img (921,600).
The model writes the input img to a ROS Image message. Using a Header Assignment block, the frame ID of the message header is set to /camera_depth_optical_frame.
Run the model to publish the message.
sim("write_image_example_model.slx");
The image message is published to the ROS network and received by the subscriber created earlier. You can use the rosReadImage function to retrieve the image in a format that is compatible with MATLAB®.
imageFormatted = rosReadImage(sub.LatestMessage);
The sample image has an rgb8 encoding. By default, rosReadImage returns the image in a standard 480-by-640-by-3 uint8 format. View this image using the imshow function.
figure imshow(imageFormatted)

Close the model and shut down the ROS network.
close_system("write_image_example_model.slx",0);
rosshutdown
Shutting down global node /matlab_global_node_29805 with NodeURI http://dcc2873394glnxa64:39067/ and MasterURI http://localhost:50152. Shutting down ROS master on http://172.20.17.249:50152.