로봇 매니퓰레이터
ROS Toolbox를 사용하면 Gazebo 또는 Unity®와 같은 ROS 지원 시뮬레이터에 연결하여 시뮬레이션 환경에서 Kinova® Robot Arm 또는 Universal Robots UR 시리즈 매니퓰레이터 같은 로봇 매니퓰레이터 모델을 사용해 애플리케이션을 시뮬레이션할 수 있습니다.
Robotics System Toolbox™를 사용해 로봇 매니퓰레이터를 모델링하여 충돌 회피를 위한 작업-공간의 이해와 모션 계획을 시연할 수 있습니다. 그런 다음 ROS Toolbox를 통해 시뮬레이터와 통신 채널을 설정하고 엔드 투 엔드 픽앤플레이스 워크플로와 같은 애플리케이션을 시뮬레이션할 수 있으며, ROS Toolbox를 사용해 ROS 메시지를 통해 제어 명령을 전송하여 로봇 매니퓰레이터를 조종하고 Gazebo 또는 Unity에서 시뮬레이션된 궤적을 볼 수 있습니다.
추천 예제

Pick-and-Place Workflow in Gazebo Using ROS
Set up pick-and-place workflow for Kinova Gen3 manipulator and simulate it in the Gazebo physics simulator using ROS.

Pick-and-Place Workflow in Unity 3D Using ROS
Set up an end-to-end pick-and-place workflow for a robotic manipulator like the Kinova Gen3, and simulate the robot in the Unity game engine.

Pick-and-Place Workflow in Gazebo Using Point-Cloud Processing and RRT Path Planning
Set up pick-and-place workflow for Kinova Gen3 manipulator using point-cloud processing and RRT path planning.
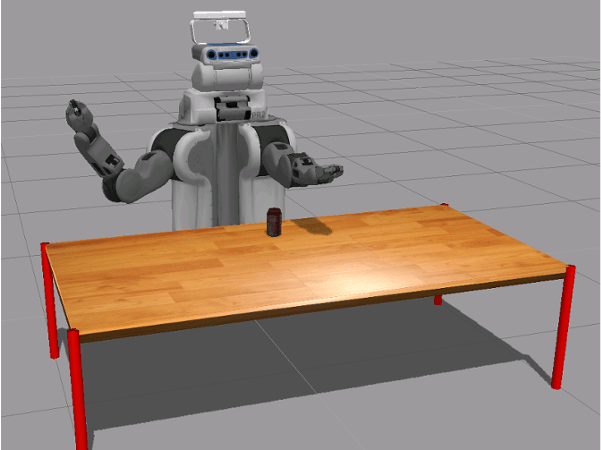
Control PR2 Arm Movements Using ROS Actions and Inverse Kinematics
Send commands and calculate joint positions for PR2 robotic arm in MATLAB®, using ROS actions and inverse kinematics.

Design and Simulate Warehouse Pick-and-Place Application Using Mobile Manipulator in Simulink and Gazebo
Set up an end-to-end, pick-and-place workflow for a mobile manipulator using Simulink® and simulate it in Gazebo®.

Generate Automated ros_control Plugin for 3-D Shape Tracing Manipulator
Generate and deploy a 3-D shape tracing contoller as a ros_control plugin from Simulink. Perform 3-D shape tracing using UR manipulator and depth point cloud.
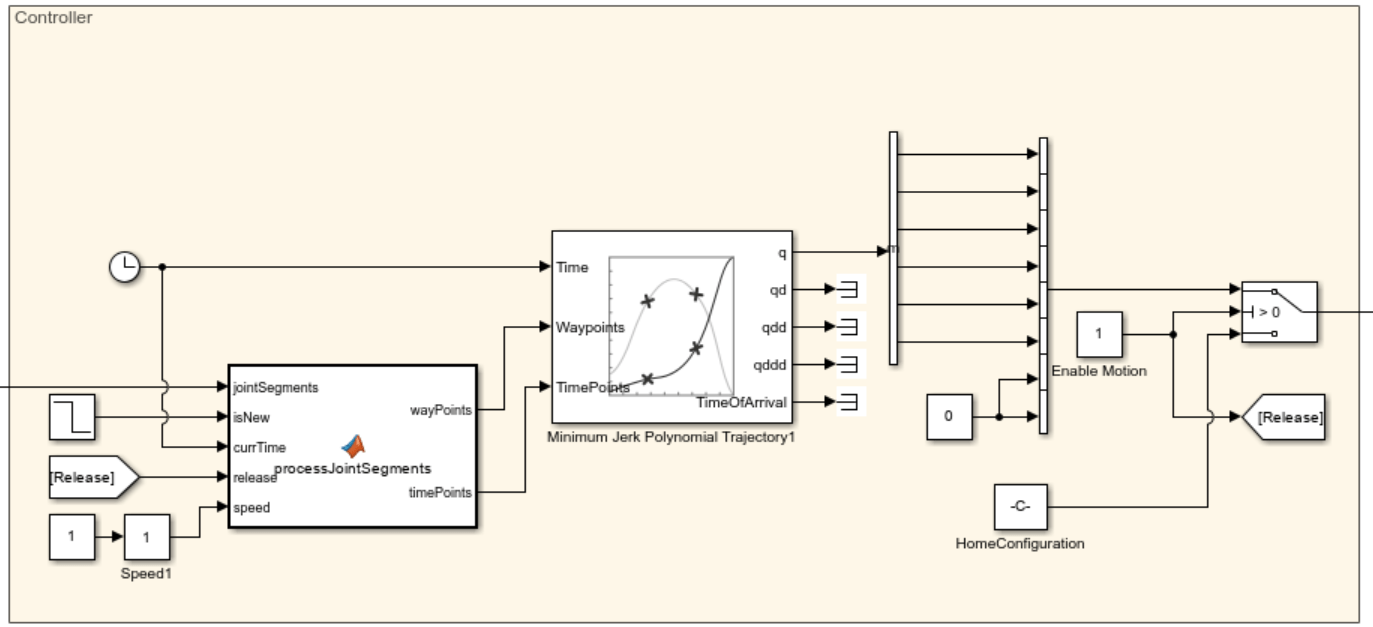
Design Trajectory Controller for UR5e Manipulator Using Simulink and Unreal Engine Co-simulation
Design a trajectory controller using Simulink® for a UR5e Manipulator. It also shows how to simulate the controller with the UR5e Manipulator robot in Unreal Engine® 3-D simulation environment.
Automated Generation and Deployment of ros2_control Plugin for Trajectory Controller
Generate a ros2_control plugin for a trajectory controller model designed in Simulink® and integrate it into an existing ROS 2 project. This example adds ROS 2 Control interfaces to the UR5e manipulator trajectory controller model designed in the previous step, Automated Generation and Deployment of ros2_control Plugin for Trajectory Controller, and generates the ros2_control plugin.

Design and Validate Object Detection and Motion Planning Algorithms Using Gazebo, OpenCV, and MATLAB
Design and validate complex application workflows for Kinova Gen3 7-DoF Ultralightweight Robot using Gazebo, OpenCV, Robotics Systems Toolbox™ and ROS Toolbox.
Control UR5 Robotic Arm Using ROS 2 Action Client in Simulink
Use ROS 2 action client in Simulink® to command a UR5 robotic arm in Gazebo by sending a joint trajectory goal to its trajectory controller.

Getting Started with Connecting and Controlling a UR5e Cobot from Universal Robots
Move UR5 cobot using joint space control, task space control, and waypoint tracking in task space and joint space in ROS.
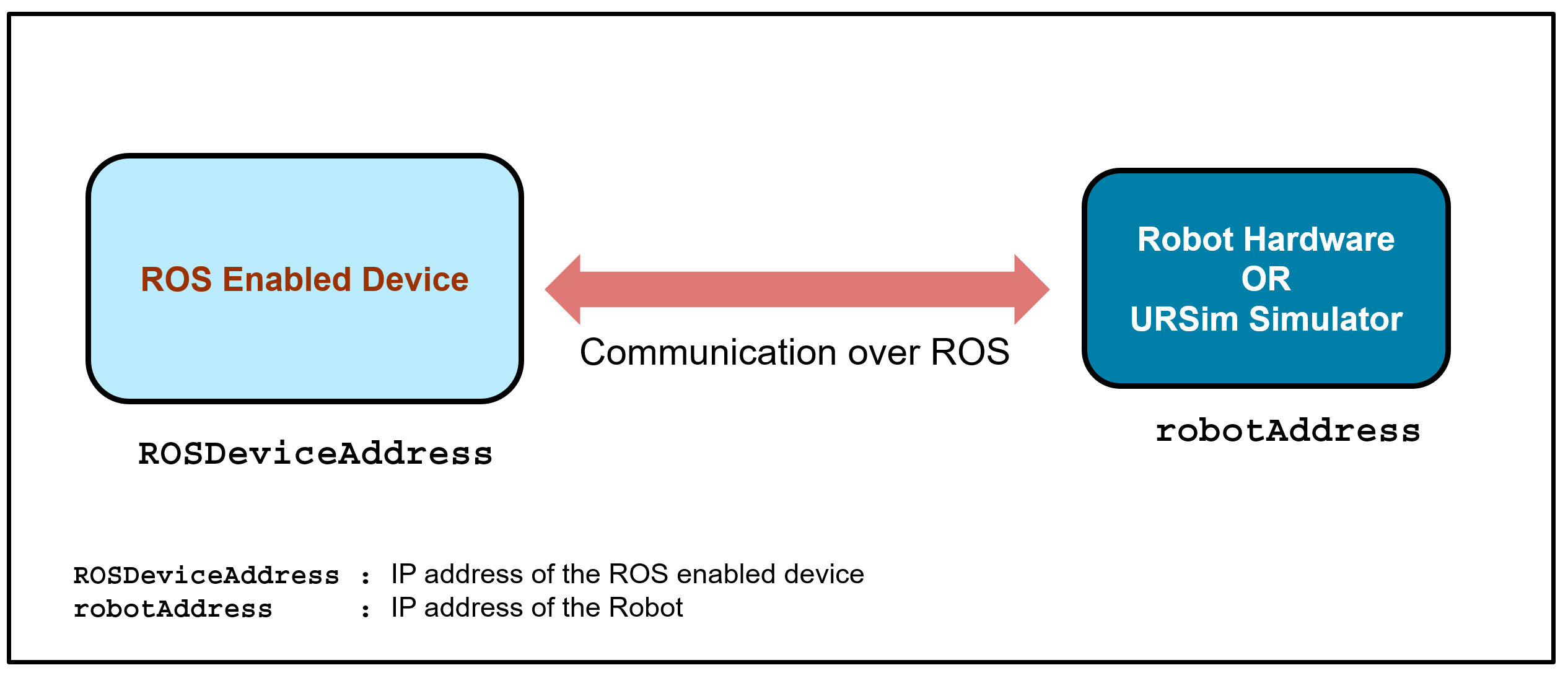
Getting Started with Standalone ROS Node Generation for Universal Robots
Plan, create and validate a deployable motion planning standalone ROS node for UR5e robot with URSim, Gazebo or physical UR5e.

Semi-Structured Intelligent Bin Picking for UR5e Using YOLO and PCA-Based Object Detection
Detailed workflow for simulating intelligent bin picking using Universal Robots UR5e cobot hardware.