Pure Pursuit
선속도 및 곡률 제어 명령
라이브러리:
Robotics System Toolbox /
Mobile Robot Algorithms
Navigation Toolbox /
Control Algorithms
설명
Pure Pursuit 블록은 일련의 웨이포인트와 차륜 이동체 또는 차동 구동 이동체의 현재 자세를 사용하여 경로를 따라가기 위한 선속도 명령과 곡률 명령을 계산합니다. 이 블록은 업데이트된 자세를 받아서, 이동체가 목표로 하는 일련의 웨이포인트를 따라 경로를 추종할 수 있도록 선속도와 곡률 명령을 업데이트합니다. 이동체의 성능에 따라 최대 곡률 및 목표 선속도 파라미터를 사용하여 곡률과 선속도를 각각 업데이트하십시오.
전방 주시 거리 포트 및 파라미터는 이동체의 순시 로컬 목표 지점인 경로상의 전방 주시 지점을 계산합니다. 곡률 명령은 이 점을 기준으로 계산됩니다. 전방 주시 거리를 변경할 경우 알고리즘의 성능에 상당한 영향을 미칩니다. 전방 주시 거리가 길수록 이동체의 궤적이 더 평활하게 되지만 이동체가 경로를 따르면서 코너를 무시하게 될 수도 있습니다. 전방 주시 거리가 너무 짧으면 경로를 따르면서 진동이 발생하여 불안정한 동작을 야기할 수 있습니다. pure pursuit 알고리즘에 대한 자세한 내용은 Pure Pursuit 제어기 항목을 참조하십시오.
예제

Path Following with Obstacle Avoidance in Simulink
Use Simulink® to avoid obstacles while following a path for a differential drive robot. This example uses ROS to send and receive information from a MATLAB-based simulator. You can replace the simulator with other ROS-based simulators such as Gazebo®.
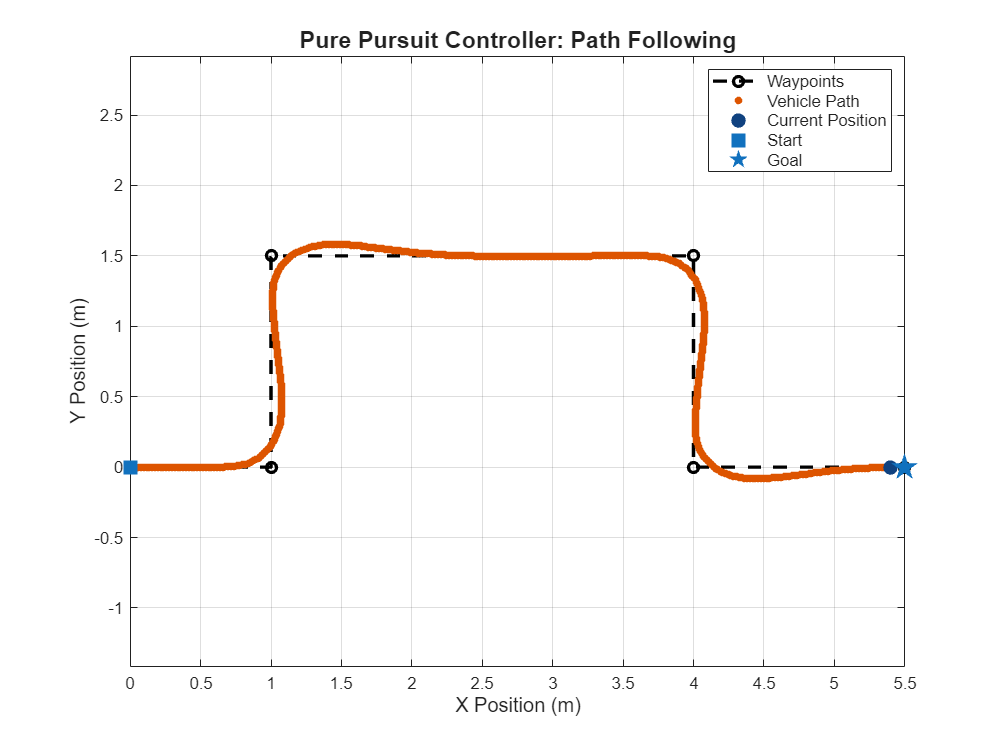
Follow Waypoints in Simulink Using Pure Pursuit Block
Guide a car-like vehicle along a series of waypoints in Simulink using the Pure Pursuit block.
포트
입력
출력
파라미터
확장 기능
버전 내역
R2019b에 개발됨참고 항목
블록
클래스
도움말 항목
- Simulink에서 차동 구동 로봇의 경로 계획하기 (Robotics System Toolbox)
- Path Following with Obstacle Avoidance in Simulink
- Pure Pursuit 제어기