rmlink
Description
Examples
Load navGraph object into MATLAB® workspace and inspect its properties.
load("navGraphData.mat")
disp(navGraphObj) navGraph with properties:
States: [8×3 table]
Links: [7×3 table]
LinkWeightFcn: @nav.algs.distanceEuclidean
Inspect the links table of the input graph.
disp(navGraphObj.Links)
EndStates Weight Curvature
_________ ______ _________
1 3 1.5089 0.0034635
3 7 8.921 0.0063649
5 4 2.387 0.0060558
6 2 19.452 0.0041751
7 1 38.776 0.0051347
7 8 13.938 0.0076324
8 2 43.893 0.0031493
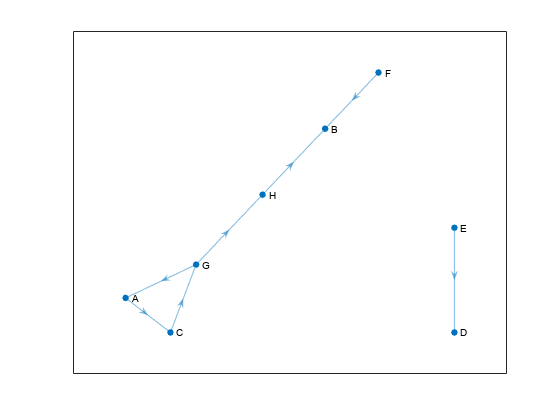
Display the input graph.
show(navGraphObj)
Specify Link Identifiers to Unlink State Pairs
Specify the indices of the state pairs you want to remove from the links table. In this example, you will remove linking between the state pairs defined in the first and third rows of the links table.
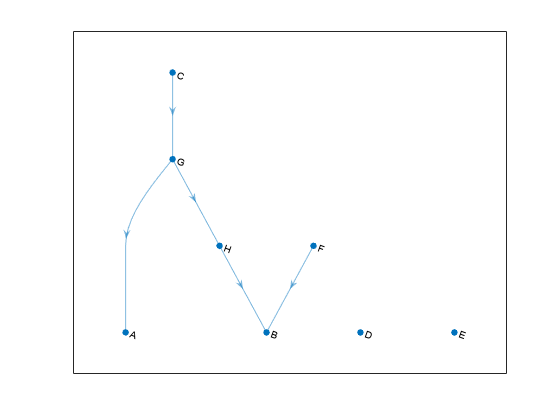
rmlink(navGraphObj,[1;3])
Inspect the updated links table for the unlinked state pairs and display the updated graph.
disp(navGraphObj.Links)
EndStates Weight Curvature
_________ ______ _________
3 7 8.921 0.0063649
6 2 19.452 0.0041751
7 1 38.776 0.0051347
7 8 13.938 0.0076324
8 2 43.893 0.0031493
Display the updated graph.
show(navGraphObj)
Specify State Indices to Unlink Multiple State Pairs
Specify the indices of the linked states in the states table that you want to disconnect.
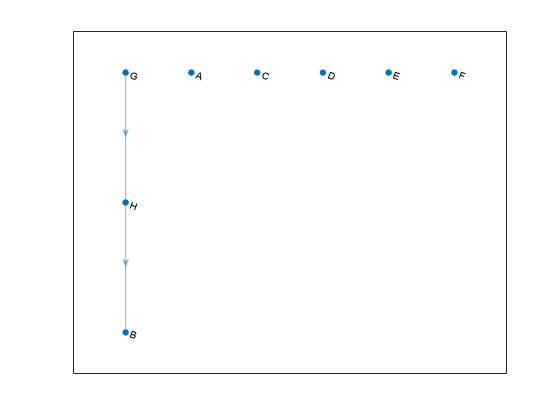
rmlink(navGraphObj,[3 7;6 2;7 1])
Inspect the updated links table for the state pairs that are disconnected.
disp(navGraphObj.Links)
EndStates Weight Curvature
_________ ______ _________
7 8 13.938 0.0076324
8 2 43.893 0.0031493
Display the updated graph.
show(navGraphObj)
Input Arguments
Extended Capabilities
Version History
Introduced in R2024a
See Also
addstate | addlink | rmstate | findlink | findstate | index2state | state2index | successors | show | copy