dubinsConnection
Dubins 경로 연결 유형
설명
dubinsConnection 객체에는 자세 사이를 연결하는 dubinsPathSegment 경로 세그먼트를 계산하기 위한 정보가 있습니다. Dubins 경로 세그먼트는 두 자세를 3개 모션 시퀀스로 연결합니다. 모션 옵션은 다음과 같습니다.
직진
최대 조향에서 좌회전
최대 조향에서 우회전
Dubins 경로 세그먼트는 정방향으로만 이동할 수 있습니다.
이 연결 객체를 사용하여 최소 회전 반경과 경로 유형 옵션을 포함하는 로봇 모션 모델의 파라미터를 정의합니다. 이 연결 유형을 사용하여 자세 간의 경로 세그먼트를 생성하려면 connect 함수를 호출하십시오.
생성
설명
dubConnObj = dubinsConnection
dubConnObj = dubinsConnection(Name,Value)
속성
객체 함수
connect | Connect poses for given connection type |
예제
dubinsConnection 객체를 만듭니다.
dubConnObj = dubinsConnection;
출발 자세와 목표 자세를 [x y theta] 벡터로 정의합니다.
startPose = [0 0 0]; goalPose = [1 1 pi];
자세를 연결하는 유효한 경로 세그먼트를 계산합니다.
[pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose);
생성된 경로를 표시합니다.
show(pathSegObj{1})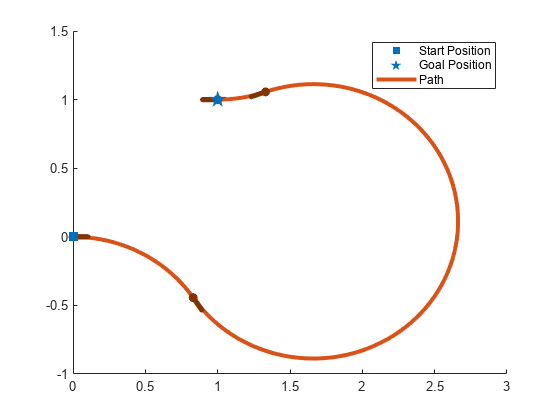
dubinsConnection 객체를 만듭니다.
dubConnObj = dubinsConnection;
출발 자세와 목표 자세를 [x y theta] 벡터로 정의합니다.
startPose = [0 0 0]; goalPose = [1 1 pi];
자세를 연결하는 유효한 경로 세그먼트를 계산합니다.
pathSegObj = connect(dubConnObj,startPose,goalPose);
생성된 경로를 표시합니다. 회전 방향을 확인합니다.
show(pathSegObj{1})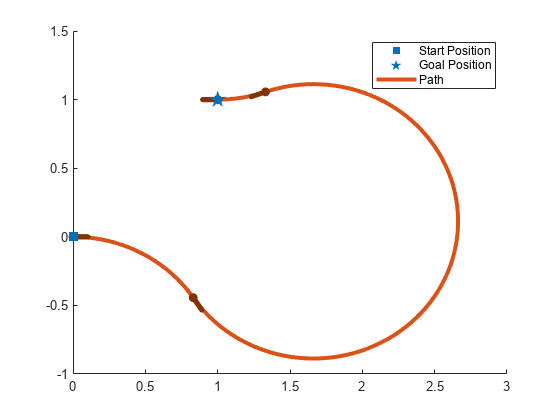
pathSegObj{1}.MotionTypesans = 1×3 cell
{'R'} {'L'} {'R'}
새 연결 객체에서 특정 모션 시퀀스를 허용하지 않도록 지정합니다. 로봇의 기동성이 더 높다면 MinTurningRadius를 줄입니다. 자세를 다시 연결하여 다른 경로를 구합니다.
dubConnObj = dubinsConnection('DisabledPathTypes',{'RLR'}); dubConnObj.MinTurningRadius = 0.5; [pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose); pathSegObj{1}.MotionTypes
ans = 1×3 cell
{'L'} {'S'} {'L'}
show(pathSegObj{1})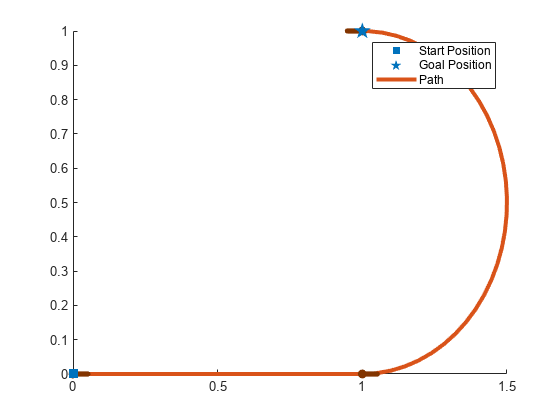
참고 문헌
[1] Shkel, Andrei M., and Vladimir Lumelsky. "Classification of the Dubins set." Robotics and Autonomous Systems. Vol. 34, No. 4, 2001, pp. 179–202.
확장 기능
버전 내역
R2019b에 개발됨