센서 보정 및 위치 감지
홀 센서, 쿼드라쳐 인코더 센서, ADC에 대한 홀 시퀀스와 오프셋을 계산하여 위치 및 전류 피드백 값을 정확하게 계산합니다.
블록
| Hall Speed and Position | Compute speed and estimate position of rotor by using Hall sensors |
| Hall Validity | Compute rotor spin direction and validity of Hall sensor sequence |
| Quadrature Decoder | Compute position of quadrature encoder |
| Resolver Decoder | Compute motor mechanical position and speed and sine and cosine values of motor electrical position |
| Mechanical to Electrical Position | Compute electrical position of rotor from mechanical position |
| Speed Measurement | 회전자 각위치로부터 속도 계산 |
도움말 항목
- ADC Offset Calibration in FOC
Calibrate for ADC Offset in FOC.
- Position Sensor Offset Calibration for Quadrature Encoder and Hall Sensor
Calibrate for sensor-based control using blocks available in Motor Control Blockset.
- How to Use Hall Validity and Hall Speed and Position Blocks
Integrate Hall Validity and Hall Decoder blocks with field-oriented control (FOC) algorithm.
추천 예제

Hall Offset Calibration for PMSM
Calculates the offset between the rotor direct axis (d-axis) and position detected by the Hall sensor. The field-oriented control (FOC) algorithm needs this position offset to run the permanent magnet synchronous motor (PMSM) correctly. To compute the offset, the target model runs the motor in the open-loop condition. The model uses a constant (voltage along the stator's
d-axis) and a zero (voltage along the stator's
q-axis) to run the motor (at a low constant speed) by using a position or ramp generator. When the position or ramp value reaches zero, the corresponding rotor position is the offset value for the Hall sensors.

Quadrature Encoder Offset Calibration for PMSM
Calculates the offset between the d-axis of the rotor and encoder index pulse position as detected by the quadrature encoder sensor. The control algorithm (available in the field-oriented control and parameter estimation examples) uses this offset value to compute an accurate and precise position of the d-axis of rotor. The controller needs this position to implement the field-oriented control (FOC) correctly in the rotor flux reference frame (d-q reference frame), and therefore, run the permanent magnet synchronous motor (PMSM) correctly.

개루프 제어에서 3상 AC 모터를 구동하고 ADC 오프셋 보정하기
이 예제에서는 개루프 제어(스칼라 제어 또는 볼트/헤르츠 제어라고도 함)를 사용하여 모터를 구동합니다. 이 기법은 모터의 피드백을 사용하지 않고 고정자 전압과 주파수를 변경하여 회전자 속도를 제어합니다. 이 기법을 사용하여 하드웨어 연결의 무결성을 검사할 수 있습니다. 속도가 일정한 개루프 제어 응용 사례에서는 고정 주파수 모터 전원을 사용합니다. 속도 조정이 가능한 개루프 제어 응용 사례에서는 회전자 속도를 제어하기 위한 가변 주파수 전원이 필요합니다. 일정한 고정자 자기 플럭스를 보장하려면 공급 전압 진폭을 그 주파수에 비례하도록 유지하십시오.

BLDC 모터의 홀 센서 시퀀스 보정
이 예제에서는 개루프 제어에서 회전자의 위치 0을 기준으로 홀 센서 시퀀스를 계산합니다. 이 워크플로를 사용하면 홀 센서에 레이블을 지정할 필요 없이 6단계 정류를 사용하여 모터를 회전시키거나 스위칭 시퀀스를 도출할 수 있습니다. 이 예제를 실행하여 홀 시퀀스를 구하고 이 홀 시퀀스를 Six Step Commutation 블록과 함께 사용하여 센서 피드백을 사용한 BLDC 모터의 6단계 정류 예제에 설명된 대로 폐루프에서 모터를 구동합니다.
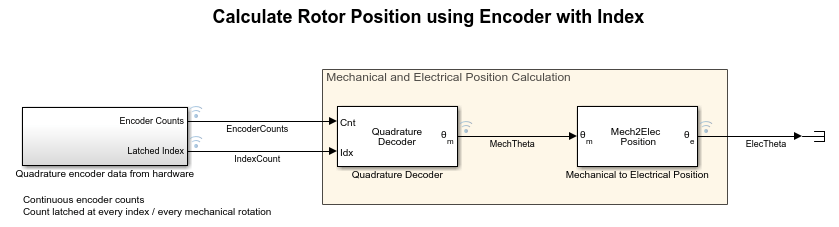
Simulate Calculation of Rotor Position Using Quadrature Decoder Block
Use the quadrature decoder block to simulate estimation of rotor position.
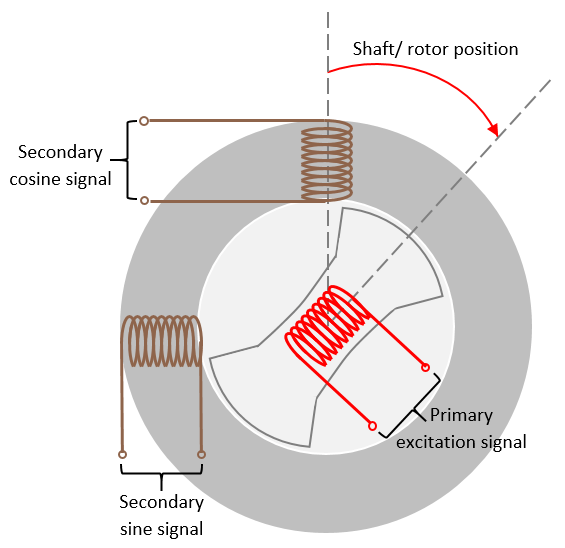
Monitor Resolver Using Serial Communication
Use the resolver sensor to measure the rotor position. The resolver consists of two stator (secondary) windings placed orthogonally around the resolver rotor (primary) winding. After you mount the resolver sensor over a PMSM, the resolver rotor winding rotates with the shaft of the running motor. Meanwhile, the controller provides a fixed-frequency excitation signal (alternating sinusoidal or square pulse) to the primary winding.