Surface Mount PMSM
정현파 역기전력을 가진 3상 외부 영구 자석 동기 모터

라이브러리:
Powertrain Blockset /
Propulsion /
Electric Motors and Inverters
Motor Control Blockset /
Electrical Systems /
Motors
설명
Surface Mount PMSM 블록은 정현파 역기전력을 가진 3상 외부 영구 자석 동기 모터(PMSM)를 구현합니다. 이 블록은 3상 입력 전압을 사용해 개별 상 전류를 조절하여 모터 토크 또는 속도를 제어할 수 있습니다.
기본적으로, 이 블록은 시뮬레이션 유형 파라미터를 연속으로 설정하여 시뮬레이션 동안 연속 샘플 시간을 사용합니다. 고정 스텝 배정밀도 및 단정밀도 타깃에 대한 코드를 생성하려면 파라미터를 이산으로 설정해 보십시오. 그런 다음 샘플 시간(Ts) 파라미터를 지정합니다.
파라미터 탭에서 역기전력 또는 토크 상수를 선택하면 블록은 다음 방정식 중 하나를 구현하여 영구 쇄교 자속 상수를 계산합니다.
| 설정 | 방정식 |
|---|---|
역기전력 상수(Ke) | |
토크 상수(Kt) | |
모터 구조
이 그림은 모터에 단일 극쌍이 있는 모터 구조를 보여줍니다.
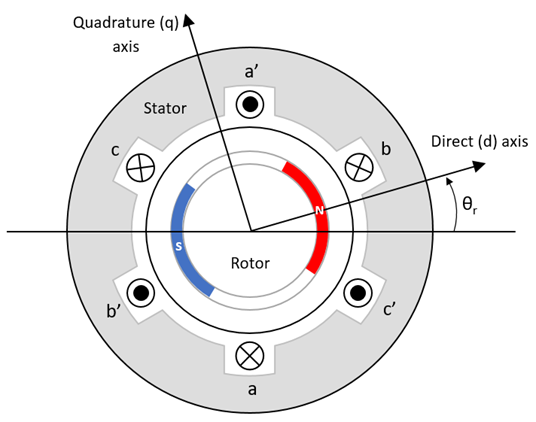
영구 자석으로 인한 모터 자기장은 모터 각도에 따른 플럭스의 정현파 변화율을 생성합니다.
축 규칙에 의하면 모터 각도 θr이 0일 때 a상과 영구 자석 플럭스가 정렬됩니다.
3상 정현파 모델 전기 시스템
이 블록은 모터 플럭스 기준 프레임(dq 프레임)으로 표현된 다음 방정식을 구현합니다. 모터 기준 프레임의 모든 수량은 고정자를 기준으로 합니다.
Lq 및 Ld 인덕턴스는 모터 자석의 돌극 형태(saliency)로 인한 상 인덕턴스와 모터 위치 간의 관계를 나타냅니다. 표면부착형 PMSM의 경우 입니다.
방정식에 사용되는 변수는 다음과 같습니다.
Lq, Ld | q축 및 d축 인덕턴스(H) |
R | 고정자 권선의 저항(ohm) |
iq, id | q축 및 d축 전류(A) |
vq, vd | q축 및 d축 전압(V) |
ωm | 모터의 기계적 각속도(rad/s) |
ωe | 모터의 전기적 각속도(rad/s) |
λpm | 영구 자석의 쇄교 자속(Wb) |
| Ke | 역기전력(EMF)(Vpk_LL/krpm, 여기서 Vpk_LL은 피크 전압 선간 측정값임) |
Kt | 토크 상수(N·m/A) Kt = 모터의 정격 토크 / Ia_peak_rated, 여기서 Ia_peak_rated는 정격 전류 작동에서 위상-a의 최대 진폭입니다. |
P | 극쌍 개수 |
Te | 전자기 토크(Nm) |
Θe | 전기각(rad) |
기계 시스템
모터 각속도는 다음과 같습니다.
방정식에 사용되는 변수는 다음과 같습니다.
J | 모터와 부하의 결합된 관성(kgm^2) |
F | 모터와 부하의 결합된 점성 마찰(N·m/(rad/s)) |
θm | 모터의 기계적 각위치(rad) |
Tm | 모터 샤프트 토크(Nm) |
Te | 전자기 토크(Nm) |
Tf | 모터 샤프트 정적 마찰 토크(Nm) |
ωm | 모터의 기계적 각속도(rad/s) |
파워 회계
파워 회계(power accounting)를 위해 블록은 다음 방정식을 구현합니다.
| 버스 신호 | 설명 | 변수 | 방정식 | ||
|---|---|---|---|---|---|
|
|
| 기계적 파워 | Pmot | |
PwrBus | 전력 | Pbus | |||
|
| PwrElecLoss | 저항성 파워 손실 | Pelec | ||
PwrMechLoss | 기계적 파워 손실 | Pmech | 기계적 입력 구성이 기계적 입력 구성이 | ||
|
| PwrMtrStored | 저장된 모터 파워 | Pstr | ||
방정식에 사용되는 변수는 다음과 같습니다.
Rs | 고정자 저항(ohm) |
ia, ib, ic | 고정자 a상, b상, c상 전류(A) |
isq, isd | 고정자 q축 및 d축 전류(A) |
van, vbn, vcn | 고정자 a상, b상, c상 전압(V) |
ωm | 모터의 기계적 각속도(rad/s) |
F | 모터와 부하의 결합된 점성 감쇠 N·m/(rad/s) |
Te | 전자기 토크(Nm) |
Tf | 모터와 부하의 결합된 마찰 토크(Nm) |
진폭 불변 dq 변환
이 블록은 다음 방정식을 사용하여 dq와 3상의 진폭들을 동일하게 하는 진폭 불변 dq 변환을 구현합니다.
방정식에 사용되는 변수는 다음과 같습니다.
Θda | 회전자 a축을 기준으로 한 dq 고정자의 전기각(rad) |
vsq, vsd | 고정자 q축 및 d축 전압(V) |
isq, isd | 고정자 q축 및 d축 전류(A) |
| va, vb, vc | 고정자 전압 a상, b상, c상(V) |
| ia, ib, ic | 고정자 전류 a상, b상, c상(A) |
포트
입력
출력
파라미터
팁
모터 파라미터를 블록 파라미터로 지정하는 대신 입력 포트를 통해 제공하려면 PMSM HDL 블록을 사용하십시오.
참고 문헌
[1] Kundur, P. Power System Stability and Control. New York, NY: McGraw Hill, 1993.
[2] Anderson, P. M. Analysis of Faulted Power Systems. Hoboken, NJ: Wiley-IEEE Press, 1995.
확장 기능
버전 내역
R2017a에 개발됨