이 번역 페이지는 최신 내용을 담고 있지 않습니다. 최신 내용을 영문으로 보려면 여기를 클릭하십시오.
개루프 제어와 폐루프 제어
이 섹션에서는 개루프 모터 제어 기법과 폐루프 모터 제어 기법을 설명합니다.
개루프 모터 제어
개루프 제어(스칼라 제어 또는 볼트/헤르츠 제어라고도 함)는 모든 AC 모터를 구동하는 데 널리 사용되는 모터 제어 기법입니다. 그리고 모터의 피드백이 필요하지 않은 단순한 기법입니다.
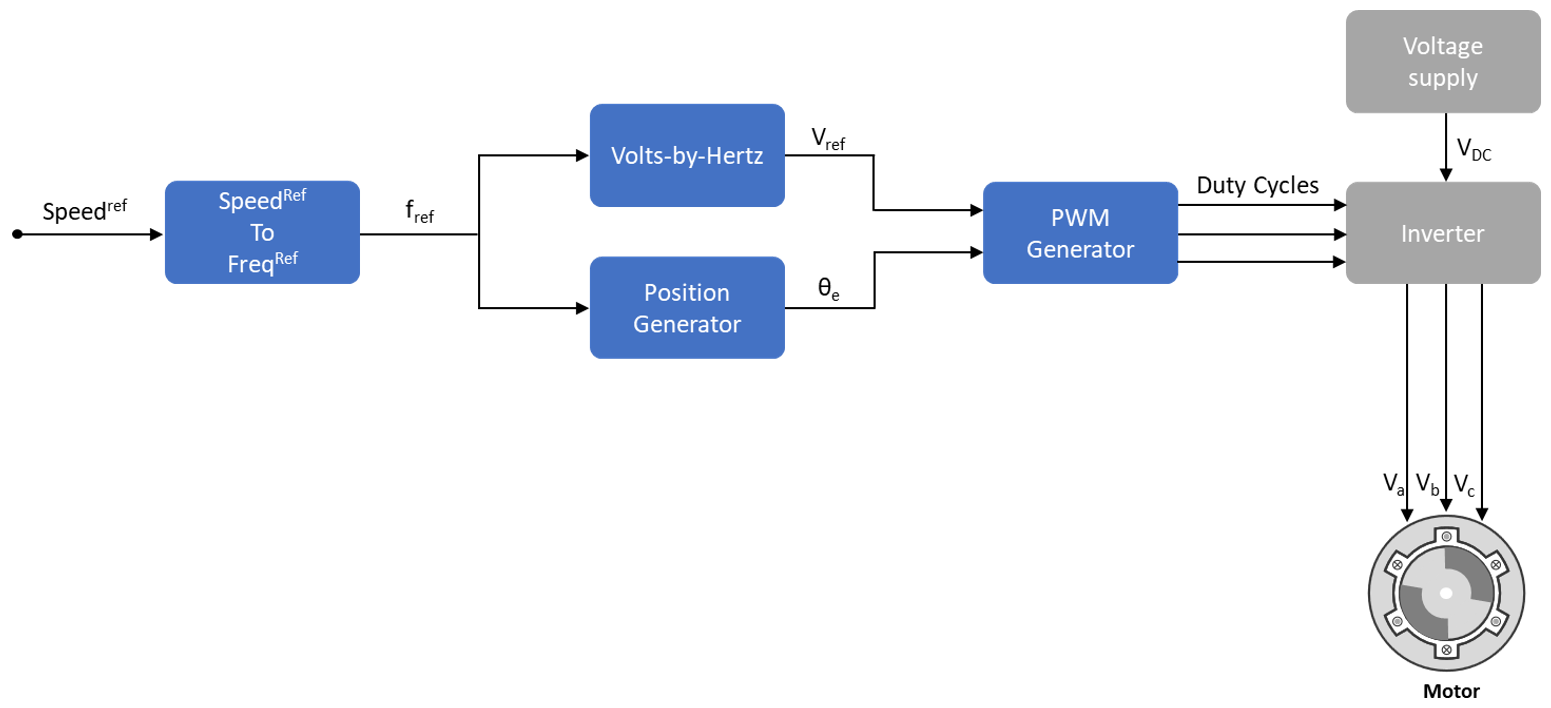
위 그림은 개루프 제어 시스템을 보여줍니다. 전원 회로는 DC 전원에서 공급되는 PWM 전압형 인버터로 구성됩니다. 이 시스템은 제어 구현을 위해 어떤 피드백 신호도 사용하지 않습니다. 그리고 기준 속도를 사용하여 고정자 전압의 주파수를 결정합니다. 이 시스템은 플럭스가 일정하게 유지되도록 정격 전압과 정격 주파수의 비(일반적으로 볼트/헤르츠 비라고 함)에 비례하여 전압 크기를 계산합니다.
여기서
은 모터의 정격 플럭스입니다(단위: Wb).
는 AC 모터의 고정자 전압입니다(단위: 볼트).
는 AC 모터의 고정자 전압의 주파수입니다(단위: Hz).
개루프 시스템에서 AC 모터의 속도는 다음과 같이 표현됩니다.
여기서
은 AC 모터의 기계적 속도입니다(단위: rpm).
는 AC 모터의 고정자 전압과 전류의 주파수입니다(단위: Hz).
는 모터의 극쌍 개수입니다.
다음 방정식을 사용하여 (지정된 기계의) 필수 기준 속도 RPMref에 도달하는 데 필요한 기준 전압의 주파수 fref를 결정합니다.
이 주파수를 사용하여 인버터에 대한 PWM 기준 전압을 생성합니다. 볼트/헤르츠 비를 다음과 같이 유지하여 전압의 크기를 계산합니다.
이 시스템은 기준 전압 주파수(fref)에서 PWM 기준 전압(Vref)의 피크 진폭을 계산할 때 정격 주파수 대비 정격 전압의 비(Vrated / frated)를 일정하게 유지합니다. 3상 전압 파형에 대해 전압/주파수 비를 일정하게 유지하면(즉, Vref는 fref에 비례함), 고정자 자기 플럭스가 비교적 일정하게 유지됩니다. 그러나 아래 그림에 표시된 것처럼 V/F 비는 전체 모터 속도 범위에서 일정하게 유지되지 않습니다.
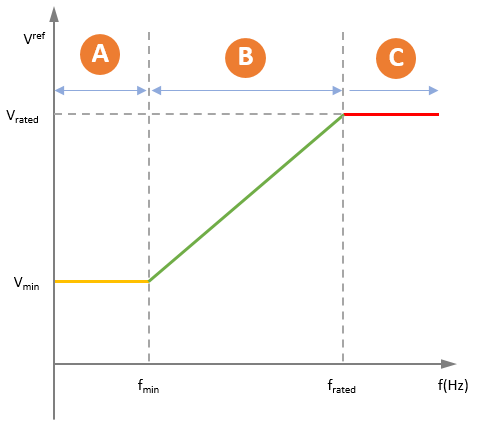
영역 A — 낮은 속도에서 시스템은 고정자 저항 전압 강하의 영향을 극복하기 위해 최소 부스트 전압(정격 전압의 15% 또는 25%)이 필요합니다. 전압 Vmin은 이러한 강하를 보상하는 역할을 합니다.
영역 B — 이 영역에서 시스템은 Vrated / frated 비를 일정하게 유지합니다. 그리고 fref를 기준으로 Vref를 계산하여 V/F 제어를 추종합니다.
영역 C — 높은 속도에서 시스템은 고정자 전압이 Vrated로 제한되기 때문에 V/F 비를 일정하게 유지할 수 없습니다. 이 영역에서 Vref는 fref가 상승하더라도 Vrated와 동일하게 유지됩니다.
per-unit 시스템 표현을 사용하는 경우, 개루프 제어 시스템은 Vrated를 베이스 수량(일반적으로 1PU 또는 100% 듀티 사이클에 해당)으로 간주합니다. 변조 기법(정현파 PWM 또는 공간 벡터 PWM)에 따라 추가 이득(정현파 PWM의 경우 )이 필요할 수 있습니다.
동적 응답이 중요한 문제가 아니며 비용 효율적인 솔루션이 필요한 응용 분야에서 개루프 제어를 사용할 수 있습니다. 개루프 모터 제어에는 모터 속도에 영향을 미칠 수 있는 외부 조건을 고려하는 기능이 없습니다. 따라서 이 제어 시스템은 원하는 모터 속도와 실제 모터 속도 간의 편차를 자동으로 수정할 수 없습니다.
참고
스칼라 제어 구현은 고정자 저항과 약계자로 인한 전압 강하 보상을 고려하지 않습니다.
폐루프 모터 제어
폐루프 제어는 시스템 피드백을 제어에 고려합니다. 모터의 폐루프 제어는 전류와 위치 같은 모터 신호의 피드백을 고려합니다. 이 제어 시스템은 피드백 신호를 사용하여 (모터에 인가되는) 전압을 조정해서 모터 응답을 기준 값으로 유지합니다.
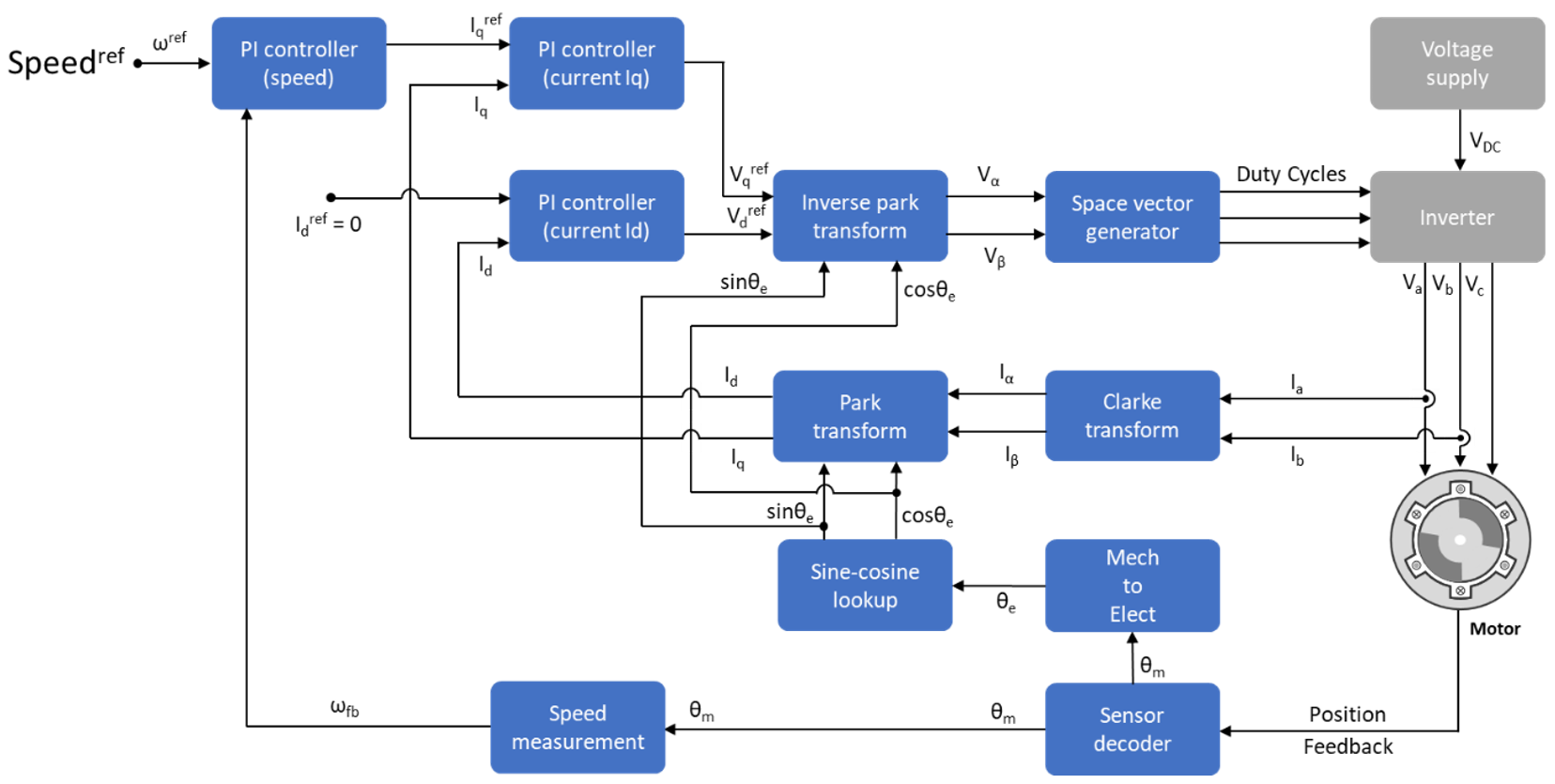
자속 기준 제어(FOC)는 벡터 제어라고도 하며, 모터 제어 응용 분야에서 널리 사용되는 폐루프 시스템입니다. FOC 기법은 모터의 폐루프 토크, 속도, 위치 제어를 구현하는 데 사용됩니다. 이 기법은 또한 전체 토크 및 속도 범위에 대해 우수한 제어 기능을 제공합니다. FOC 구현에서는 고정자 전류를 고정자 기준 프레임에서 회전자 플럭스 기준 프레임으로 변환해야 합니다.
속도 제어와 토크 제어는 FOC에서 일반적으로 사용되는 제어 모드입니다. 위치 제어 모드는 자주 사용되지 않습니다. 대부분의 구동 응용 사례에서는 모터 제어 시스템이 기준 토크 값을 추종하는 토크 제어 모드를 사용합니다. 속도 제어 모드에서 모터 제어기는 기준 속도 값을 추종하며 내부 서브시스템을 형성하는 토크 제어를 위한 토크 기준을 생성합니다. 반면, 위치 제어 모드에서는 속도 제어기가 내부 서브시스템을 형성합니다.
FOC 알고리즘을 구현하려면 전류와 회전자 위치의 실시간 피드백이 필요합니다. 센서를 사용하여 전류와 회전자 위치를 측정할 수 있습니다. 또한 실제 센서 기반 측정값 대신 추정된 피드백 값을 사용하는 센서리스 기법을 사용할 수 있습니다.
폐루프 제어는 실시간 위치와 고정자 전류 피드백을 사용하여 속도 제어기와 전류 제어기를 조정하고 인버터의 듀티 사이클을 변경합니다. 이렇게 하면 (모터를 구동하는) 수정된 3상 전압 공급을 통해 원하는 값에서 벗어난 모터 피드백 편차를 수정할 수 있습니다.
개루프에서 폐루프로의 전환
일부 응용 분야에서는 개루프 제어를 사용하여 모터를 시동해야 합니다. 모터가 개루프 제어에서 요구되는 최소한의 안정성을 달성하면 제어 시스템이 폐루프로 바뀝니다.
쿼드라쳐 인코더 기반 위치 감지 시스템에서, 모터는 개루프에서 시동되고 인덱스 펄스가 감지되면 폐루프로 전환됩니다.
센서리스 위치 제어에서, 모터는 개루프에서 베이스 속도의 10%로 구동을 시작합니다. 기준 스위치가 베이스 속도의 10%를 초과하면 제어 시스템은 개루프에서 폐루프로 전환됩니다.
개루프에서 폐루프로 원활하게 전환할 수 있도록 PI 제어기는 개루프 출력과 동일한 초기 조건에서 재설정되어 시작됩니다.
영구 자석 동기 모터(PMSM)의 센서리스 위치 제어를 개루프에서 폐루프로 전환하는 방법에 대해 자세히 알아보려면 PMSM의 센서리스 자속 기준 제어 항목을 참조하십시오.