ode23s
경직성(Stiff) 미분방정식 풀기 — 저차수법(Low order method)
구문
설명
[입니다. 여기서 t,y] = ode23s(odefun,tspan,y0)tspan = [t0 tf]는 t0에서 tf까지의 구간에서 초기 조건 y0을 사용하여 연립미분방정식 를 적분합니다. 해 배열 y의 각 행은 열 벡터 t에 반환된 값에 대응합니다.
모든 MATLAB® ODE 솔버는 형식의 연립방정식이나 질량 행렬이 있는 문제 를 풀 수 있습니다. 솔버는 모두 유사한 구문을 사용합니다. ode23s 솔버는 상수 질량 행렬을 갖는 문제만 풀 수 있습니다. ode15s와 ode23t는 특이 질량 행렬을 포함하는 문제(즉, 미분대수 방정식(DAE))를 풀 수 있습니다. odeset의 Mass 옵션을 사용하여 질량 행렬을 지정합니다.
[는 이벤트 함수라고 하는 (t,y)의 함수가 0인 위치를 추가로 찾습니다. 출력값에서 t,y,te,ye,ie] = ode23s(odefun,tspan,y0,options)te는 이벤트 발생 시간이고, ye는 이벤트 발생 시 계산된 해이며, ie는 트리거된 이벤트의 인덱스입니다.
각 이벤트 함수에 대해, 0에서 적분을 종료할지 여부와 영점교차의 방향을 고려할지 여부를 지정합니다. 이를 수행하려면 'Events' 속성을 함수(예: myEventFcn 또는 @myEventFcn)로 설정하고 대응 함수 [value,isterminal,direction] = myEventFcn(t,y)를 생성합니다. 자세한 내용은 ODE 이벤트 위치 항목을 참조하십시오.
sol = ode23s(___)deval과 함께 사용하여 구간 [t0 tf] 내의 임의의 점에서 해를 계산할 수 있는 구조체를 반환합니다. 위에 열거된 구문에 나와 있는 입력 인수를 원하는 대로 조합하여 사용할 수 있습니다.
예제
단일 해 성분을 갖는 단순한 ODE는 솔버 호출 시 익명 함수로 지정할 수 있습니다. 익명 함수는 입력값 중 하나가 함수에 사용되지 않는 경우에도 두 입력값 (t,y)를 모두 받아야 합니다.
다음 ODE를 풉니다.
시간 구간 [0 2]와 초기 조건 y0 = 1을 지정합니다.
tspan = [0 2]; y0 = 1; [t,y] = ode23s(@(t,y) -10*t, tspan, y0);
해를 플로팅합니다.
plot(t,y,'-o')
경직성 연립방정식의 한 예로는, 이완 진동의 반데르폴 방정식(van der Pol equation)을 들 수 있습니다. 극한 주기 궤도(limit cycle)에서는 해 성분의 변화가 느리면서 문제의 경직성이 강한(Stiff) 영역과, 해 성분의 변화가 매우 급격하면서 문제의 경직성이 약한(Nonstiff) 영역이 번갈아가며 나타납니다.
연립방정식은 다음과 같습니다.

초기 조건은  와
와  입니다. 함수
입니다. 함수 vdp1000은 MATLAB®과 함께 제공되는 함수로, 이 방정식을 담고 있습니다.
function dydt = vdp1000(t,y) %#ok<INUSD> %VDP1000 Evaluate the van der Pol ODEs for mu = 1000. % % See also ODE15S, ODE23S, ODE23T, ODE23TB. % Jacek Kierzenka and Lawrence F. Shampine % Copyright 1984-2025 The MathWorks, Inc. dydt = [y(2); 1000*(1-y(1)^2)*y(2)-y(1)];
디폴트 상대 허용오차와 절대 허용오차(각각 1e-3 및 1e-6)와 함께 ode45를 사용하여 이 시스템을 푸는 경우 해를 구하고 플로팅하는 데 몇 분이 걸릴 정도로 매우 느립니다. 허용오차를 충족하기가 쉽지 않은 경직성이 강한 영역으로 인해 ode45가 적분을 완료하려면 수백만 개의 시간 스텝이 필요합니다.
다음은 계산하는 데 시간이 오래 걸리는 ode45로 구한 해에 대한 플롯입니다. 경직성이 강한 영역을 통과하는 데 필요한 시간 스텝의 수가 엄청나다는 것을 알 수 있습니다.
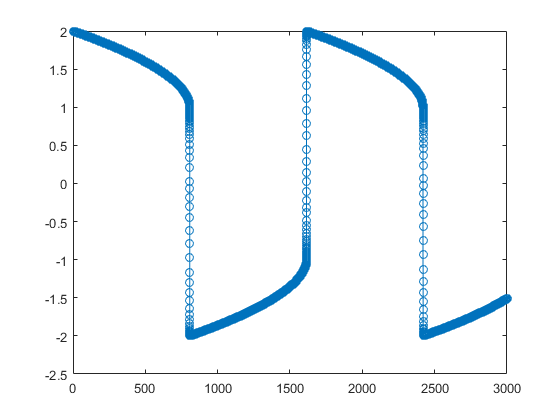
ode23s 솔버를 사용하여 경직성 시스템을 풀고, 시간 지점 t에 대해 해 y의 첫 번째 열을 플로팅합니다. ode23s 솔버는 ode45보다 훨씬 적은 수의 스텝으로 경직성이 강한 영역을 통과합니다.
[t,y] = ode23s(@vdp1000,[0 3000],[2 0]);
plot(t,y(:,1),'-o')

ode23s는 두 개의 입력 인수 t와 y를 사용하는 함수에만 동작합니다. 하지만, 함수 외부에 추가 파라미터를 정의하고 함수 핸들을 지정할 때 이를 전달하는 방식으로 추가 파라미터를 전달할 수 있습니다.
다음 ODE를 풉니다.

방정식을 1계 시스템으로 다시 작성하면 다음 결과가 생성됩니다.

odefcn.m은 이 연립방정식을 4개의 입력 인수 t, y, A, B를 받는 함수로 나타냅니다.
function dydt = odefcn(t,y,A,B)
dydt = zeros(2,1);
dydt(1) = y(2);
dydt(2) = (A/B)*t.*y(1);
ode23s를 사용하여 ODE를 풉니다. A와 B의 미리 정의된 값을 odefcn에 전달하도록 함수 핸들을 지정합니다.
A = 1; B = 2; tspan = [0 5]; y0 = [0 0.01]; [t,y] = ode23s(@(t,y) odefcn(t,y,A,B), tspan, y0);
결과를 플로팅합니다.
plot(t,y(:,1),'-o',t,y(:,2),'-.')

ode15s 솔버는 대부분의 경직성 문제에서 최우선적으로 선택할 수 있는 솔버입니다. 하지만, 특정 문제 유형에 대해서는 다른 경직성 솔버가 더욱 효율적일 수도 있습니다. 이 예제에서는 네 가지 경직성 ODE 솔버를 모두 사용하여 경직성 테스트 방정식을 풉니다.
다음과 같은 테스트 방정식이 있다고 가정해 보겠습니다.
의 크기가 증가함에 따라 방정식의 경직성도 커집니다. 시간 구간 [0 0.5]에서 과 초기 조건 을 사용합니다. 이들 값을 사용하는 경우 ode45와 ode23으로 방정식을 적분하는 것이 쉽지 않을 만큼 문제의 경직성이 강합니다. 또한, odeset을 사용하여 상수 야코비 행렬 를 전달하고 솔버 통계량 표시를 설정합니다.
lambda = 1e9; y0 = 1; tspan = [0 0.5]; opts = odeset('Jacobian',-lambda,'Stats','on');
ode15s, ode23s, ode23t, ode23tb를 사용하여 방정식을 풉니다. 비교를 위해 서브플롯을 만듭니다.
subplot(2,2,1) tic, ode15s(@(t,y) -lambda*y, tspan, y0, opts), toc
104 successful steps 1 failed attempts 212 function evaluations 0 partial derivatives 21 LU decompositions 210 solutions of linear systems Elapsed time is 1.499378 seconds.
title('ode15s')
subplot(2,2,2)
tic, ode23s(@(t,y) -lambda*y, tspan, y0, opts), toc63 successful steps 0 failed attempts 191 function evaluations 0 partial derivatives 63 LU decompositions 189 solutions of linear systems Elapsed time is 0.460420 seconds.
title('ode23s')
subplot(2,2,3)
tic, ode23t(@(t,y) -lambda*y, tspan, y0, opts), toc95 successful steps 0 failed attempts 125 function evaluations 0 partial derivatives 28 LU decompositions 123 solutions of linear systems Elapsed time is 0.237496 seconds.
title('ode23t')
subplot(2,2,4)
tic, ode23tb(@(t,y) -lambda*y, tspan, y0, opts), toc71 successful steps 0 failed attempts 167 function evaluations 0 partial derivatives 23 LU decompositions 236 solutions of linear systems Elapsed time is 0.231518 seconds.
title('ode23tb')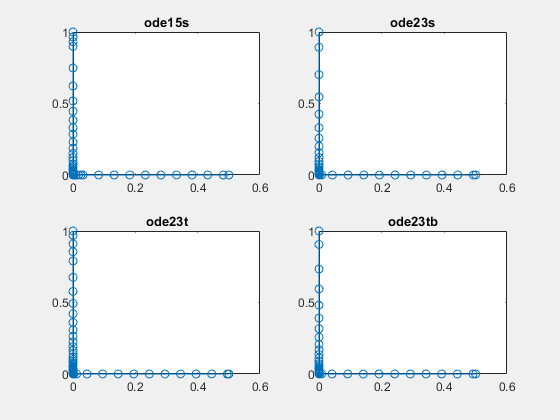
네 경직성 솔버 모두 성능이 뛰어나지만, 이 특정 문제에 대해서는 ode23s가 가장 적은 개수의 스텝으로 적분을 완료하며 실행 속도도 가장 빠릅니다. 상수 야코비 행렬이 지정되었으므로, 이들 중 어떤 솔버도 해를 구하기 위해서 편도함수를 계산할 필요가 없습니다. ode23s는 보통 각 스텝에서 야코비 행렬을 계산하므로 야코비 행렬을 지정하는 경우 이 솔버를 사용하는 것이 가장 유리합니다.
일반적인 경직성 문제의 경우, 경직성 솔버의 성능은 문제의 형식과 지정된 옵션에 따라 달라집니다. 경직성 문제에 대해 야코비 행렬이나 희소성 패턴을 제공하면 솔버의 효율성은 항상 더 높아집니다. 하지만 경직성 솔버는 야코비 행렬을 각각 다르게 사용하기 때문에 향상되는 정도는 크게 달라질 수 있습니다. 실제로, 연립방정식의 크기가 매우 크거나 여러 번 해를 구해야 하는 경우 실행 시간을 최소화하기 위해 다양한 솔버의 성능을 검토하는 것이 좋습니다.
입력 인수
출력 인수
알고리즘
ode23s는 수정된 2차의 로젠브록(Rosenbrock) 공식을 기반으로 합니다. 이는 단일 스텝(Single-step) 솔버이므로 엄격하지 않은 허용오차를 허용하는 문제나 급격히 달라지는 해를 갖는 문제를 풀 때 ode15s보다 더 효율적일 수 있습니다. 이 솔버는 ode15s가 효과적이지 않은 일부 유형의 경직성 문제를 풀 수 있습니다. ode23s 솔버는 각 적분 스텝에서 야코비 행렬을 계산하므로, 야코비 행렬에 대한 정보를 제공하는 것이 안정성과 효율성 측면에서 매우 중요합니다. ([1])
참고 문헌
[1] Shampine, L. F. and M. W. Reichelt, “The MATLAB ODE Suite,” SIAM Journal on Scientific Computing, Vol. 18, 1997, pp. 1–22.