makima
조각별 3차 에르미트 다항식 변형 보간
설명
예제
makima를 사용하여 간격이 균일하지 않은 샘플 점에서 코사인 곡선을 보간합니다.
x = [0 1 2.5 3.6 5 7 8.1 10]; y = cos(x); xq = 0:.25:10; yq = makima(x,y,xq); plot(x,y,'o',xq,yq,'--')
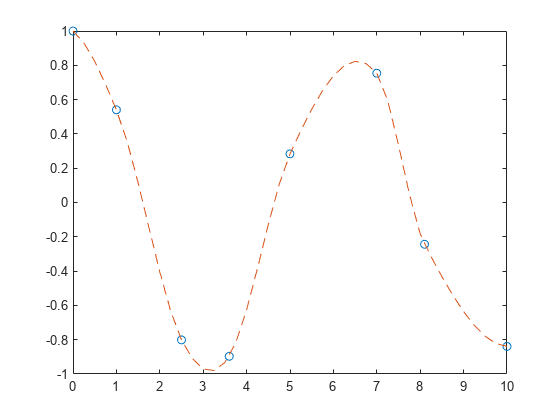
진동 함수를 사용하여 아키마 알고리즘이 국소 극값 근처의 곡선을 평탄화합니다. 이 평탄화를 보상하려면 국소 극값 근처에 더 많은 샘플 점을 추가하면 됩니다.
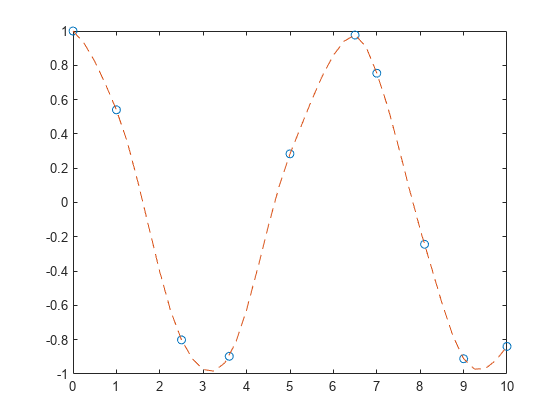
와 를 추가하고 보간을 다시 플로팅합니다.
x = [0 1 2.5 3.6 5 6.5 7 8.1 9 10]; y = cos(x); xq = 0:.25:10; yq = makima(x,y,xq); plot(x,y,'o',xq,yq,'--')
두 개의 다른 데이터 세트에 대해 spline, pchip, makima에서 생성된 보간 결과를 비교합니다. 이들 함수는 모두 다양한 형태의 조각별 3차 에르미트 보간을 수행합니다. 각각의 함수는 보간 함수의 기울기를 계산하는 방법이 다르므로, 기본 데이터에 평탄 영역이나 요동이 있을 때 다양한 동작이 나타납니다.
평탄 영역을 연결하는 샘플 데이터에 대한 보간 결과를 비교합니다. x 값, 해당 점에서의 함수 값 y, 쿼리 점 xq로 구성된 벡터를 만듭니다. spline, pchip, makima를 사용하여 쿼리 점에서 보간을 계산합니다. 비교를 위해 쿼리 점에서 보간된 함수 값을 플로팅합니다.
x = -3:3; y = [-1 -1 -1 0 1 1 1]; xq1 = -3:.01:3; p = pchip(x,y,xq1); s = spline(x,y,xq1); m = makima(x,y,xq1); plot(x,y,'o',xq1,p,'-',xq1,s,'-.',xq1,m,'--') legend('Sample Points','pchip','spline','makima','Location','SouthEast')
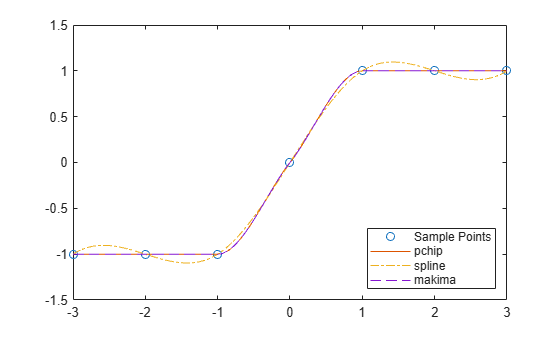
이 경우, pchip과 makima는 오버슈트를 피하고 평탄 영역을 정확하게 연결할 수 있다는 점에서 비슷하게 동작합니다.
진동 샘플 함수를 사용하여 두 번째 비교를 수행합니다.
x = 0:15; y = besselj(1,x); xq2 = 0:0.01:15; p = pchip(x,y,xq2); s = spline(x,y,xq2); m = makima(x,y,xq2); plot(x,y,'o',xq2,p,'-',xq2,s,'-.',xq2,m,'--') legend('Sample Points','pchip','spline','makima')
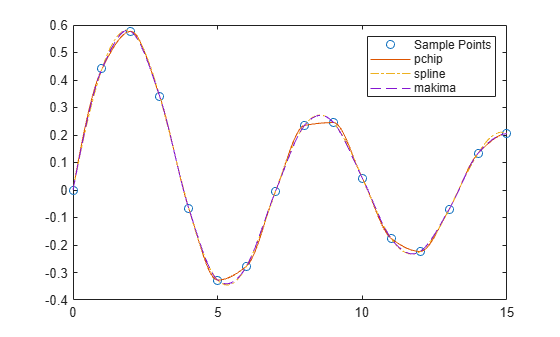
기본 함수가 진동 함수인 경우 국소 극값 근처에서 과감하게 평탄화되는 pchip보다 spline과 makima가 점 사이의 움직임을 포착하는 능력이 더 우수합니다
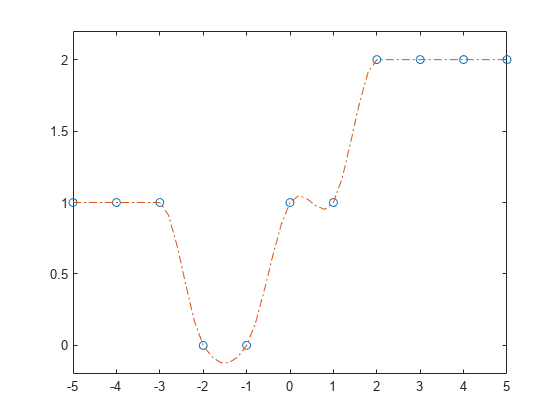
샘플 점 x와 이러한 점에서의 값 y에 대한 벡터를 만듭니다. makima를 사용하여 데이터에 대한 조각별 다항식 구조체를 생성합니다.
x = -5:5; y = [1 1 1 0 0 1 1 2 2 2 2]; pp = makima(x,y)
pp = struct with fields:
form: 'pp'
breaks: [-5 -4 -3 -2 -1 0 1 2 3 4 5]
coefs: [10×4 double]
pieces: 10
order: 4
dim: 1
구조체에는 데이터를 포괄하는 차수가 4인 10개의 다항식에 대한 정보가 포함됩니다. pp.coefs(i,:)에는 절점 [breaks(i) breaks(i+1)]에 의해 정의된 영역에서 유효한 다항식 계수가 포함됩니다.
구조체에 ppval을 사용하여 여러 쿼리 점에서 보간을 계산한 다음 결과를 플로팅합니다. 3개 이상의 상수 점이 있는 영역에서 아키마 알고리즘은 직선을 사용하여 각 점을 연결합니다.
xq = -5:0.2:5; m = ppval(pp,xq); plot(x,y,'o',xq,m,'-.') ylim([-0.2 2.2])
입력 인수
출력 인수
세부 정보
참고 문헌
[1] Akima, Hiroshi. "A new method of interpolation and smooth curve fitting based on local procedures." Journal of the ACM (JACM) , 17.4, 1970, pp. 589–602.
[2] Akima, Hiroshi. "A method of bivariate interpolation and smooth surface fitting based on local procedures." Communications of the ACM , 17.1, 1974, pp. 18–20.
확장 기능
버전 내역
R2019b에 개발됨