cart2sph
카테시안 좌표(Cartesian Coordinate)를 구면 좌표(Spherical)로 변환
설명
예제
입력 인수
출력 인수
알고리즘
3차원 카테시안 좌표(Cartesian Coordinate)의 구면 좌표 매핑은 다음과 같습니다.
azimuth = atan2(y,x) elevation = atan2(z,sqrt(x.^2 + y.^2)) r = sqrt(x.^2 + y.^2 + z.^2)
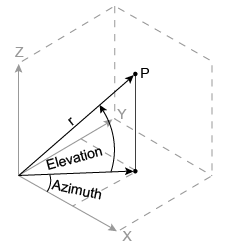
구면 좌표의 표기법은 표준이 아닙니다. cart2sph 함수에서 elevation은 x-y 평면으로부터 측정됩니다. elevation = 0일 때 대응하는 점은 x-y 평면에 존재합니다. elevation = pi/2일 때 대응하는 점은 양의 z축에 있습니다.
확장 기능
버전 내역
R2006a 이전에 개발됨