oe
Estimate output-error polynomial model using time-domain or frequency-domain data
Syntax
Description
Output-error (OE) models are a special configuration of polynomial models, having
only two active polynomials—B and F. OE models represent
conventional transfer functions that relate measured inputs to outputs while also including
white noise as an additive output disturbance. You can estimate OE models using time- and
frequency-domain data. The tfest command offers the same functionality as
oe. For tfest, you specify the model orders using
number of poles and zeros rather than polynomial degrees. For continuous-time estimation,
tfest provides faster and more accurate results, and is
recommended.
Estimate OE Model
sys = oe(tt,[nb
nf nk])sys using the data contained in the variables
of timetable tt. The software uses the first Nu
variables as inputs and the next Ny variables as outputs, where
Nu and Ny are determined from the dimensions of
the specified polynomial orders.
sys is represented by the equation
Here, y(t) is the output, u(t) is the input, and e(t) is the error.
The orders [nb nf nk] define the number of parameters in each
component of the estimated polynomial.
To select specific input and output channels from tt, use
name-value syntax to set 'InputName' and
'OutputName' to the corresponding timetable variable names.
sys = oe(u,y,[nb nf nk])u,y. The software assumes that the data sample
time is 1 second. To change the sample time, set Ts using name-value
syntax.
sys = oe(data,[nb
nf nk])data.
sys = oe(___,Name,Value)
Configure Initial Parameters
Specify Additional Estimation Options
Return Estimated Initial Conditions
[
returns the estimated initial conditions as an sys,ic] = oe(___)initialCondition
object. Use this syntax if you plan to simulate or predict the model response using the
same estimation input data and then compare the response with the same estimation output
data. Incorporating the initial conditions yields a better match during the first part of
the simulation.
Examples
Estimate an OE polynomial from time-domain data using two methods to specify input delay.
Load the estimation data.
load sdata1 tt1
Set the orders of the B and F polynomials nb and nf. Set the input delay nk to one sample. Compute the model sys.
nb = 2; nf = 2; nk = 1; sys = oe(tt1,[nb nf nk]);
Compare the simulated model response with the measured output.
compare(tt1,sys)
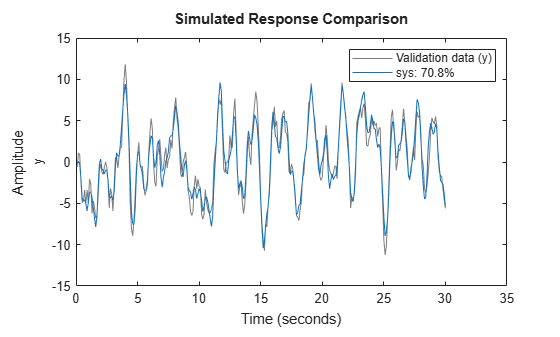
The plot shows that the fit percentage between the simulated model and the estimation data is greater than 70%.
Instead of using nk, you can also use the name-value pair argument 'InputDelay' to specify the one-sample delay.
nk = 0; sys1 = oe(tt1,[nb nf nk],InputDelay=1); figure compare(tt1,sys1)
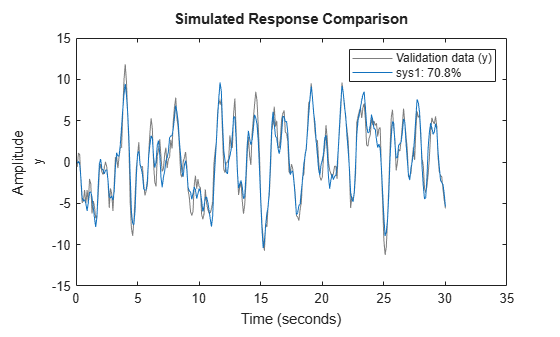
The results are identical.
You can view more information about the estimation by exploring the idpoly property sys.Report.
sys.Report
ans =
Status: 'Estimated using OE'
Method: 'OE'
InitialCondition: 'zero'
Fit: [1×1 struct]
Parameters: [1×1 struct]
OptionsUsed: [1×1 idoptions.polyest]
RandState: [1×1 struct]
DataUsed: [1×1 struct]
Termination: [1×1 struct]
For example, find out more information about the termination conditions.
sys.Report.Termination
ans = struct with fields:
WhyStop: 'Near (local) minimum, (norm(g) < tol).'
Iterations: 3
FirstOrderOptimality: 0.0708
FcnCount: 7
UpdateNorm: 1.4809e-05
LastImprovement: 5.1744e-06
The report includes information on the number of iterations and the reason the estimation stopped iterating.
Load the estimation data.
load oe_data1 data;
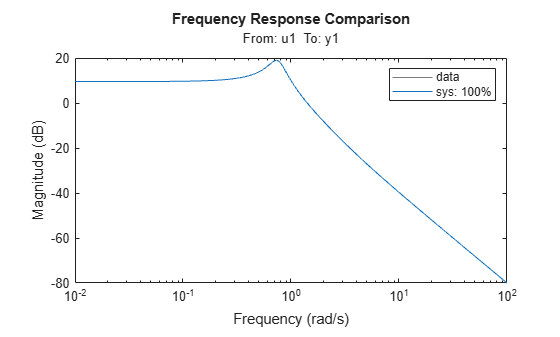
The idfrd object data contains the continuous-time frequency response for the following model:
Estimate the model.
nb = 2; nf = 3; sys = oe(data,[nb nf]);
Evaluate the goodness of fit.
compare(data,sys);
Estimate a high-order OE model from data collected by simulating a high-order system. Determine the regularization constants by trial and error and use the values for model estimation.
Load the data.
load regularizationExampleData.mat m0simdata
Estimate an unregularized OE model of order 30.
m1 = oe(m0simdata,[30 30 1]);
Obtain a regularized OE model by determining the Lambda value using trial and error.
opt = oeOptions; opt.Regularization.Lambda = 1; m2 = oe(m0simdata,[30 30 1],opt);
Compare the model outputs with the estimation data.
opt = compareOptions('InitialCondition','z'); compare(m0simdata,m1,m2,opt);
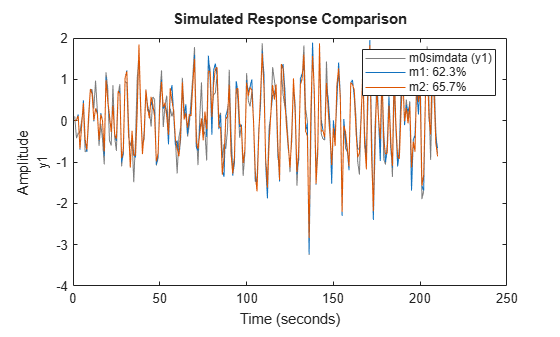
The regularized model m2 produces a better fit than the unregularized model m1.
Compare the variance in the model responses.
bp = bodeplot(m1,m2);
bp.PhaseMatchingEnabled = "on";
bp.Characteristics.ConfidenceRegion.NumberOfStandardDeviations = 3;
showConfidence(bp);
The regularized model m2 has a reduced variance compared to the unregularized model m1.
Load the estimation data data and sample time Ts.
load oe_data2.mat data Ts
An iddata object data contains the discrete-time frequency response for the following model:
View the estimation sample time Ts that you loaded.
Ts
Ts = 1.0000e-03
This value matches the property data.Ts.
data.Ts
ans = 1.0000e-03
You can estimate a continuous model from data by limiting the input and output frequency bands to the Nyquist frequency. To do so, specify the estimation prefilter option 'WeightingFilter' to define a passband from 0 to 0.5*pi/Ts rad/s. The software ignores any response values with frequencies outside of that passband.
opt = oeOptions('WeightingFilter',[0 0.5*pi/Ts]); Set the Ts property to 0 to treat data as continuous-time data.
data.Ts = 0;
Estimate the continuous model.
nb = 1; nf = 3; sys = oe(data,[nb nf],opt);
Load the data, which consists of input and output data in matrix form and the sample time.
load sdata1i umat1i ymat1i Ts1i
Estimate an OE polynomial model sys and return the initial conditions in ic.
nb = 2;
nf = 2;
nk = 1;
[sys,ic] = oe(umat1i,ymat1i,[nb,nf,nk],'Ts',Ts1i);
icic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0.9428 0.4824]
Ts: 0.1000
ic is an initialCondition object that encapsulates the free response of sys, in state-space form, to the initial state vector in X0. You can incorporate ic when you simulate sys with the umat1i input signal and compare the response with the ymat1i output signal.