arx
ARX, ARIX, AR 또는 ARI 모델의 파라미터 추정
구문
설명
AR 또는 ARX 모델 추정하기
sys = arx(tt,[na nb nk])tt의 변수에 포함된 데이터를 사용하여 ARX 또는 AR idpoly 모델 sys의 파라미터를 추정합니다. 소프트웨어는 첫 번째 Nu 변수를 입력으로 사용하고 다음 Ny 변수를 출력으로 사용합니다. 여기서 Nu와 Ny는 각각 nb와 na의 차원에서 결정됩니다.
AR 모델의 경우 입력 신호가 없으며 sys = arx(tt,na)를 사용합니다. 이 경우 소프트웨어는 첫 번째 Ny 변수를 사용하여 모델을 피팅합니다.
arx는 [na nb nk]에 지정된 최소제곱 방법과 다항식 차수를 사용하여 추정을 수행합니다. 모델 속성에는 추정 데이터와 측정 데이터 간의 공분산(파라미터 불확실성)과 피팅의 적합도가 포함됩니다.
tt에서 특정 입력 채널과 출력 채널을 선택하려면 이름-값 구문을 사용하여 'InputName'과 'OutputName'을 대응하는 타임테이블 변수 이름으로 설정합니다.
sys = arx(u,y,[na nb nk])u,y에서 시간 영역 입력 신호와 출력 신호를 사용합니다. 소프트웨어는 데이터 샘플 시간이 1초라고 가정합니다. 샘플 시간을 변경하려면 이름-값 구문을 사용하여 Ts를 설정합니다.
sys = arx(data,[na nb nk])data에 있는 시간 영역 데이터 또는 주파수 영역 데이터를 사용합니다. 특히 주파수 영역 데이터나 주파수 응답 데이터를 사용하여 모델을 추정하려는 경우 또는 데이터 샘플 시간이나 실험 레이블 지정과 같이 데이터 객체가 제공하는 추가 정보를 활용하려는 경우 이 구문을 사용하십시오.
추가 옵션 지정하기
sys = arx(___,Name,Value)'IntegrateNoise',1을 사용하여 ARIX 구조 모델 또는 ARI 구조 모델을 추정할 수 있으며 이는 비정상 외란이 있는 시스템에 유용합니다. 이 구문은 위에 열거된 구문에 나와 있는 입력 인수를 원하는 대로 조합하여 사용할 수 있습니다.
추정된 초기 조건 반환하기
[는 추정된 초기 조건을 sys,ic] = arx(___)initialCondition 객체로 반환합니다. 동일한 추정 입력 데이터를 사용하여 모델 응답을 시뮬레이션하거나 예측한 다음, 그 응답을 동일한 추정 출력 데이터와 비교하려는 경우 이 구문을 사용하십시오. 초기 조건을 통합하면 시뮬레이션의 첫 번째 부분 동안 더 나은 일치율을 얻습니다.
예제
지정된 ARX 모델을 기반으로 출력 데이터를 생성하고 출력 데이터를 사용하여 모델을 추정합니다.
ARX 구조를 사용해 다항식 모델 sys0을 지정합니다. 이 모델에는 B 다항식에서 선행 0으로 표현되는 한 개 샘플의 입력 지연이 포함됩니다.
A = [1 -1.5 0.7]; B = [0 1 0.5]; sys0 = idpoly(A,B);
랜덤 이진 잡음을 포함하는 측정된 입력 신호 u와 정규분포된 잡음을 포함하는 오차 신호 e를 생성합니다. 이러한 신호로 sys0의 측정된 출력 신호 y를 시뮬레이션합니다.
u = iddata([],idinput(300,'rbs'));
e = iddata([],randn(300,1));
y = sim(sys0,[u e]);y와 u를 단일 iddata 객체 z로 결합합니다. z 및 원래 모델과 동일한 다항식 차수와 입력 지연을 사용하여 새로운 ARX 모델을 추정합니다.
z = [y,u]; sys = arx(z,[2 2 1])
sys =
Discrete-time ARX model: A(z)y(t) = B(z)u(t) + e(t)
A(z) = 1 - 1.524 z^-1 + 0.7134 z^-2
B(z) = z^-1 + 0.4748 z^-2
Sample time: 1 seconds
Parameterization:
Polynomial orders: na=2 nb=2 nk=1
Number of free coefficients: 4
Use "polydata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using ARX on time domain data "sys0".
Fit to estimation data: 81.36% (prediction focus)
FPE: 1.025, MSE: 0.9846
Model Properties
출력에는 추정된 파라미터가 포함된 다항식이 다른 추정 세부 정보와 함께 표시됩니다. Status에서 Fit to estimation data는 추정된 모델의 향후 1-스텝 사전 예측의 정확도가 80%보다 높다는 것을 나타냅니다.
arx 함수를 사용하여 시계열 AR 모델을 추정합니다. AR 모델에는 측정된 입력이 없습니다.
잡음이 있는 시계열 타임테이블 데이터 tt9를 불러옵니다.
load sdata9 tt9
[na nb nk]에서 na 차수만 지정하여 4차 AR 모델을 추정합니다.
sys = arx(tt9,4);
추정된 A 다항식 파라미터와 데이터에 대한 추정값의 피팅을 검토합니다.
param = sys.Report.Parameters.ParVector
param = 4×1
-0.7923
-0.4780
-0.0921
0.4698
fit = sys.Report.Fit.FitPercent
fit = 79.4835
ARIX 모델의 파라미터를 추정합니다. ARIX 모델은 적분된 잡음이 있는 ARX 모델입니다.
ARX 구조를 사용해 다항식 모델 sys0을 지정합니다. 이 모델에는 B에서 선행 0으로 표현되는 한 개 샘플의 입력 지연이 포함됩니다.
A = [1 -1.5 0.7]; B = [0 1 0.5]; sys0 = idpoly(A,B);
랜덤 이진 입력 신호 u와 정규분포된 오차 신호 e를 사용하여 sys0의 출력 신호를 시뮬레이션합니다.
u = iddata([],idinput(300,'rbs'));
e = iddata([],randn(300,1));
y = sim(sys0,[u e]);출력 신호를 적분하고 결과 yi를 iddata 객체 zi에 저장합니다.
yi = iddata(cumsum(y.y),[]); zi = [yi,u];
zi에서 ARIX 모델을 추정합니다. 이름-값 쌍의 인수 'IntegrateNoise'를 true로 설정합니다.
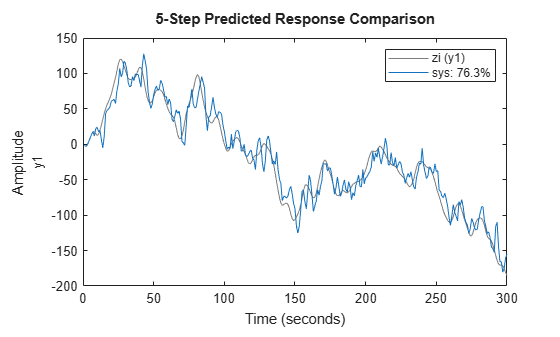
sys = arx(zi,[2 2 1],'IntegrateNoise',true);5-스텝 예측을 사용하여 모델 출력을 예측하고 결과를 yi와 비교합니다.
compare(zi,sys,5)
arxRegul을 사용하여 자동으로 정규화 상수를 결정하고, FIR 모델을 차수 50으로 추정하는 데 필요한 값들을 사용합니다.
lambda 값과 R 값을 구합니다.
load regularizationExampleData eData; orders = [0 50 0]; [lambda,R] = arxRegul(eData,orders);
정규화된 ARX 모델 추정을 위해, 반환된 lambda 값과 R 값을 사용합니다.
opt = arxOptions; opt.Regularization.Lambda = lambda; opt.Regularization.R = R; sys = arx(eData,orders,opt);
데이터를 불러옵니다.
load iddata1ic z1i
2차 ARX 모델 sys를 추정하고 ic에 초기 조건을 반환합니다.
na = 2; nb = 2; nk = 1; [sys,ic] = arx(z1i,[na nb nk]); ic
ic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0 2]
Ts: 0.1000
ic는 상태공간 형식에서 sys의 자유 응답 변수를 X0의 초기 상태 벡터로 캡슐화하는 initialCondition 객체입니다. sys를 z1i 입력 신호로 시뮬레이션하고 그 응답을 z1i 출력 신호와 비교할 때 ic를 포함할 수 있습니다.
입력 인수
이름-값 인수
출력 인수
세부 정보
알고리즘
QR 분해는 최소제곱 추정 문제를 구성하는 과결정된 선형 방정식 세트를 풉니다.
정규화 없이 ARX 모델 파라미터 벡터 θ는 정규 방정식을 풀어서 추정됩니다.
여기서 J는 회귀 변수 행렬이고 y는 측정된 출력입니다. 그러므로, 다음이 성립합니다.
정규화를 사용하면 정규화 항이 추가됩니다.
여기서 λ와 R은 정규화 상수입니다. 정규화 상수에 대한 자세한 내용은 arxOptions 항목을 참조하십시오.
회귀 행렬이 arxOptions에 지정된 MaxSize보다 크면 데이터가 분할되고 데이터 세그먼트에서 QR 분해를 반복적으로 수행합니다.